
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
-102
TEKNISK TIDSKRIFT
1 febr. 1930
s tant, fortsätter att rotera med samma eftersläpning
och moment som förut.
Genom omkopplingen har emellertid ett nytt
moment tillförts motorn, ett s. k. synkroniserande
moment, som må betecknas Ms.
Detta moment är ej konstant utan förändras
oupphörligt såväl till storlek som riktning.
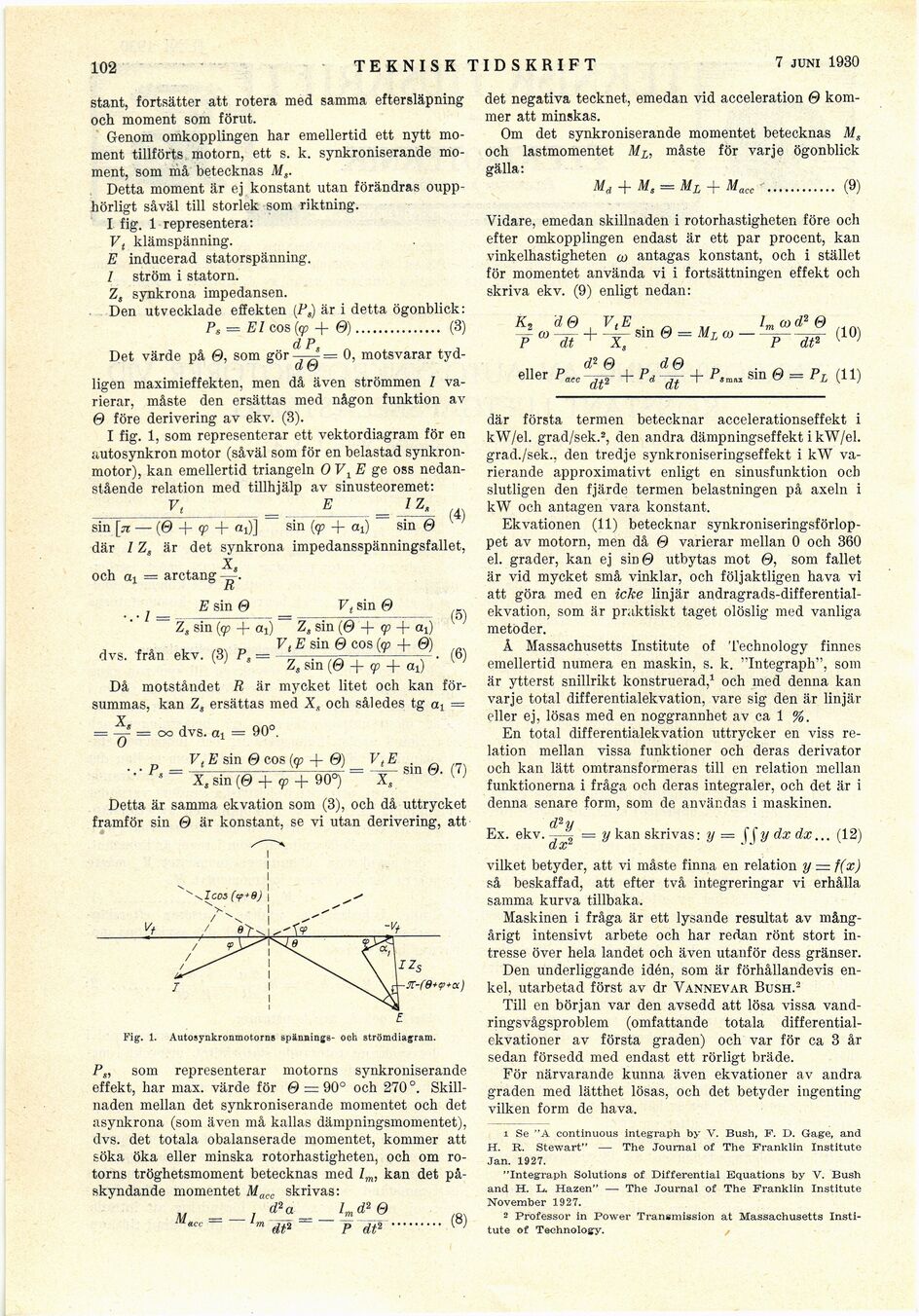
I fig. 1 representera:
Vt klämspänning.
E inducerad statorspänning.
/ ström i statorn.
Zs synkrona impedansen.
Den utvecklade eöekten (Ps) är i detta ögonblick:
Ps = El eos (cp + 0)............... (3)
d P
Det värde på 0, som gör = 0, motsvarar
tydligen maximieffekten, men då även strömmen 1
varierar, måste den ersättas med någon funktion av
0 före derivering av ekv. (3).
I fig. 1, som representerar ett vektordiagram för en
autosynkron motor (såväl som för en belastad
synkronmotor), kan emellertid triangeln OV1E ge oss
nedanstående relation med tillhjälp av sinusteoremet:
V,
E
IZ.
(4)
sin [n — (0 -f cp + aj)] sin (cp + di) sin 0
där 1 Zs är det synkrona impedansspänningsfallet
och aj = arctang
l =
R
E sin 0
F, sin 0
Zs sin [cp + at) Z, sin (0 -f cp + Ql)
V t E sin 0 eos (cp + 0)
(5)
(6)
dvs. från ekv. (3) Ps = .
w Z, sm (0 + cp + öl)
Då motståndet R är mycket litet och kan
försummas, kan Zs ersättas med Xx och således tg ax =
= = oo dvs. ax = 90°
O
Px =
V t E sin 0 eos (cp + 0)
VtE
= ~ sin 0. (7)
Xs sin (0 + <p + 90°)
Detta är samma ekvation som (3), och då uttrycket
framför sin 0 är konstant, se vi utan derivering, att
Fig. 1. Autosynkronmotorns spännings- och strömdiagram.
Ps, som representerar motorns synkroniserande
effekt, har max. värde för 0 = 90° och 270°.
Skillnaden mellan det synkroniserande momentet och det
asynkrona (som även må kallas dämpningsmomentet),
dvs. det totala obalanserade momentet, kommer att
söka öka eller minska rotorhastigheten, och om
rotorns tröghetsmoment betecknas med Im, kan det
påskyndande momentet Macc skrivas:
d2a lm d2 0
.... (ö)
M«cc =
det negativa tecknet, emedan vid acceleration 0
kommer att minskas.
Om det synkroniserande momentet betecknas Ms
och lastmomentet ML, måste för varje ögonblick
gälla:
Ma + Ms = Ml + Macc- .......... (9)
Vidare, emedan skillnaden i rotorhastigheten före och
efter omkopplingen endast är ett par procent, kan
vinkelhastigheten co antagas konstant, och i stället
för momentet använda vi i fortsättningen effekt och
skriva ekv. (9) enligt nedan:
Äj de VtE .
L
CO ’
1 0
eller P„
d26 d©
+ Pd W + Ps
dt2
P
sin 0
(10)
dt2
= Pl (H)
dt2
P dt2
där första termen betecknar accelerationseffekt i
kW/el. grad/sek.2, den andra dämpningseffekt i kW/el.
grad./sek., den tredje synkroniseringseffekt i kW
varierande approximativt enligt en sinusfunktion och
slutligen den fjärde termen belastningen på axeln i
kW och antagen vara konstant.
Ekvationen (11) betecknar
synkroniseringsförloppet av motorn, men då 0 varierar mellan 0 och 360
el. grader, kan ej sinØ utbytas mot 0, som fallet
är vid mycket små vinklar, och följaktligen hava vi
att göra med en icke linjär
andragrads-differential-ekvation, som är praktiskt taget olöslig med vanliga
metoder.
Å Massachusetts Institute of Technology finnes
emellertid numera en maskin, s. k. "Integraph", som
är ytterst snillrikt konstruerad,1 och med denna kan
varje total differentialekvation, vare sig den är linjär
eller ej, lösas med en noggrannhet av ca 1 %.
En total differentialekvation uttrycker en viss
relation mellan vissa funktioner och deras derivator
och kan lätt omtransformeras till en relation mellan
funktionerna i fråga och deras integraler, och det är i
denna senare form, som de användas i maskinen.
d u
Ex. ekv. —-g = y kan skrivas : y = f J y dx dx... (12)
vilket betyder, att vi måste finna en relation y = †(x)
så beskaffad, att efter två integreringar vi erhålla
samma kurva tillbaka.
Maskinen i fråga är ett lysande resultat av
mångårigt intensivt arbete och har redan rönt stort
intresse över hela landet och även utanför dess gränser.
Den underliggande idén, som är förhållandevis
enkel, utarbetad först av dr Vannevar Bush.2
Till en början var den avsedd att lösa vissa
vand-ringsvågsproblem (omfattande totala
differentialekvationer av första graden) och var för ca 3 år
sedan försedd med endast ett rörligt bräde.
För närvarande kunna även ekvationer av andra
graden med lätthet lösas, och det betyder ingenting
vilken form de hava.
1 Se "A continuous integraph by V. Bush, F. D. Gage, and
H. R. Stewart" — The Journal of The Franklin Institute
Jan. 1927.
"Integraph Solutions of Differential Equations by V. Bush
and H. L. Hazen" — The Journal of The Franklin Institute
November 1927.
2 Professor in Power Transmission at Massachusetts
Institute of Technology.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}