
Full resolution (JPEG) - On this page / på denna sida - Sidor ...

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
104
TEKNISK TIDSKRIFT
20 SePt. 1930
9 ß2
s, =
Gi
\ß2
i
+
Q2
k2
sin (ßt
+ Q___ \J—
Q Ö2 V Q ß
+
sin 3 (ßt ■
8 ß2 v 9 ß2 ’ k2
Om man nu enligt fig. 4 använder beteckningarna
tø__
Gi i jv2 , Q2
antages vara noll. Härigenom förenklas emellertid en
stor del av ekvationerna i betydande grad och kunna
med fördel utvecklas vidare.
För vägens funktion av tiden erhålles sålunda i
enlighet med ekv. (21) uttrycket
Sj! = V
Gx
sin ßt
G i
9 ß2 —
och
d =
8 ß2
tzl
8 ß2
V-v
k2
V
V 9/
+ -
9 ß2 k2
(57)
(58)
eller som funktion av n enligt ekv. 35.
’~k
mi m \ I
VSjl
sin yt
(63)
’i
g2k
■■-ni/—l
V gt
sin ßt -f
ar
e sin [ßt + o) + d sin 3 (ßt + a) ... (59)
första derivatan av denna ekvation
ni/—
* Gi
4–—–— sm n ßt
n(n2 — 1)
(64)
Förmedelst
kan man bestämma de tider, efter vilka
sitt maximum. Detta inträffar efter
1
t =
arc sm
e
+ 12 d’
s± uppnår
(60)
4
Användes detta värde i ekv. (59), så får man här
för första gången ett direkt uttryck för kranens
maximala väg, nämligen
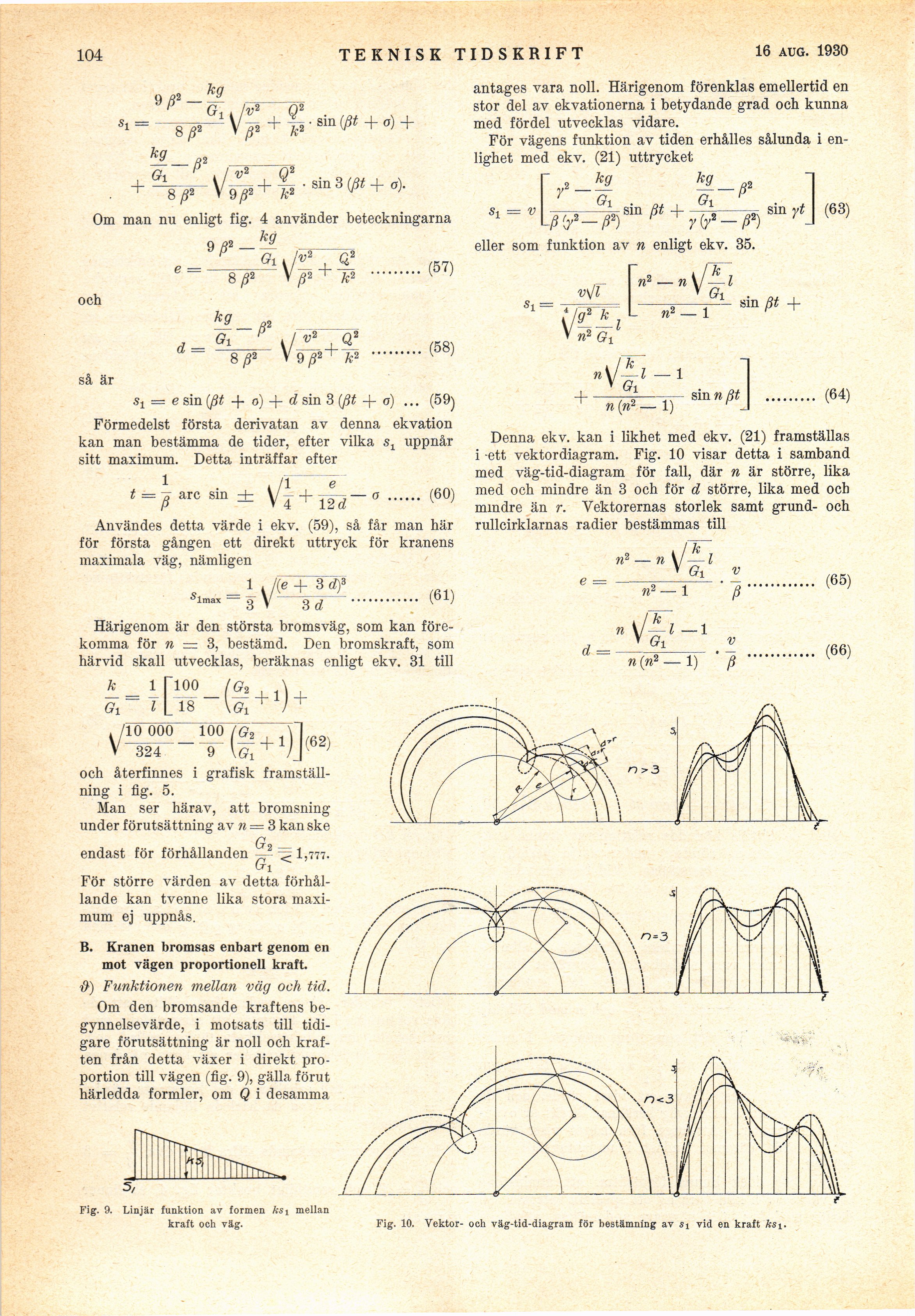
Denna ekv. kan i likhet med ekv. (21) framställas
i -ett vektordiagram. Fig. 10 visar detta i samband
med väg-tid-diagram för fall, där n är större, lika
med och mindre än 3 och för d större, lika med och
mindre än r. Vektorernas storlek samt grund- och
rullcirklarnas radier bestämmas till
n2 — n V/-1
-iV
\e 4-3 d)3
3 d
(61)
Härigenom är den största bromsväg, som kan
förekomma för n — 3, bestämd. Den bromskraft, som
härvid skall utvecklas, beräknas enligt ekv. 31 till
d =
n2 — 1
ir
Gx
k
Gi v
ß
nSj~-l-1
— l) ’ ß
(65)
(66)
k
Gi
= t[
100
18 ’
+ 1 +
\/5
100
. (t+Th
i grafisk framställ-
/10 000
"324
och återfinnes
ning i fig. 5.
Man ser härav, att bromsning
under förutsättning av n = 3 kan ske
G
endast för förhållanden —? ^1,777.
För större värden av detta
förhållande kan tvenne lika stora
maximum ej uppnås.
B. Kranen bromsas enbart genom en
mot vägen proportionell kraft.
#) Funktionen mellan väg och tid.
Om den bromsande kraftens
begynnelsevärde, i motsats till
tidigare förutsättning är noll och
kraften från detta växer i direkt
proportion till vägen (fig. 9), gälla förut
härledda formler, om Q i desamma
Fig. 9. Linjär funktion av formen ksi mellan
kraft och väg.
Fig. 10. Vektor- och väg-tid-diagram ffir bestämning av st vid en kraft ks i.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}