
Full resolution (TIFF) - On this page / på denna sida - Häfte 1. Jan. 1933 - A. E. Ullerstam: Om körbanekurvor
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
JAN. 1933
VÄG- OCH VATTENBYGGNADSKONST
. Vridningscentrum
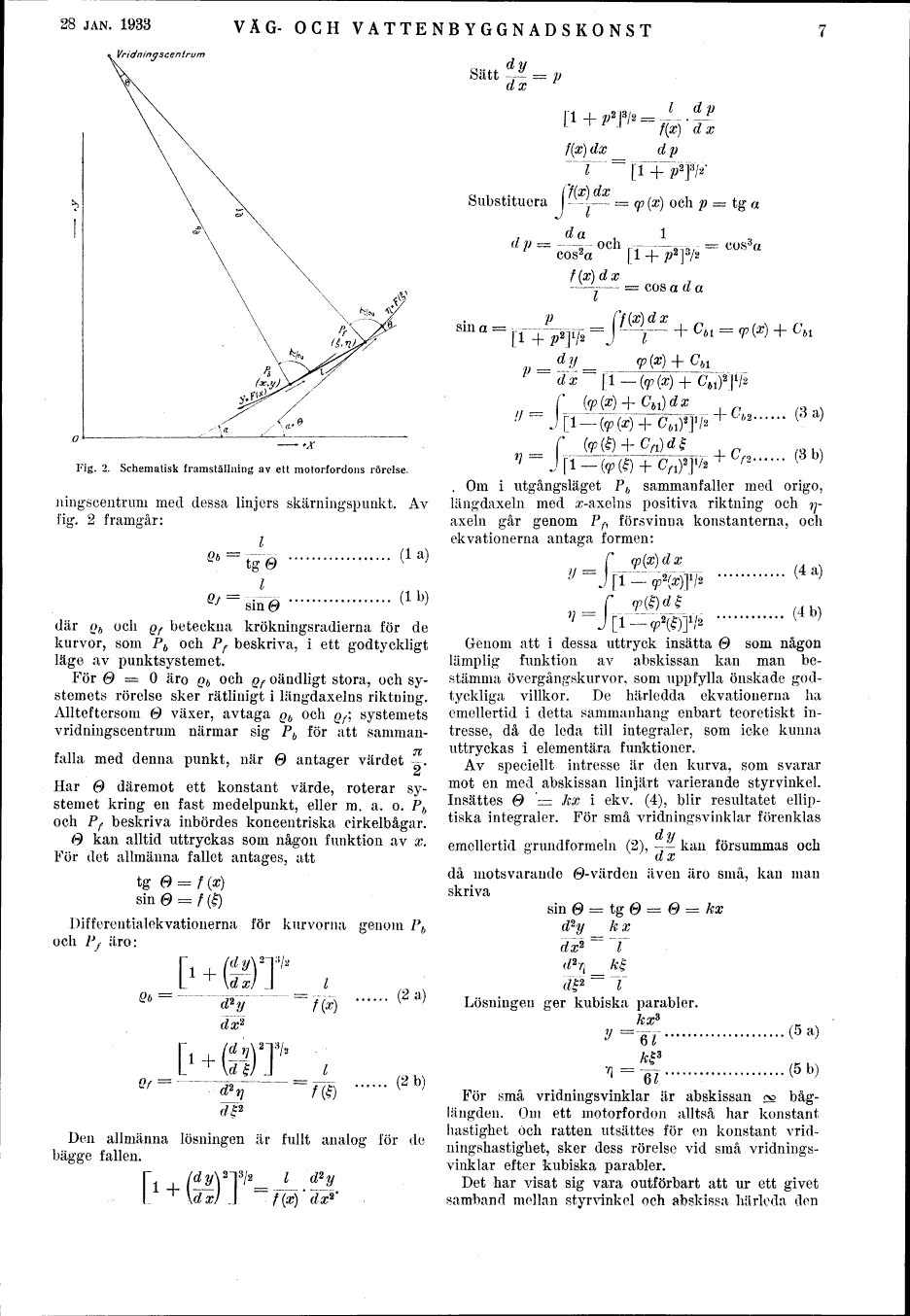
Fig. 2. Schematisk framställning av ett motorfordons rörelse.
iiingscentrum med dessa linjers skärningspunkt. Av
f ig. 2 framgår:
l
£,==-.–,,- .................. (l b)
^J sm 0
där Qb och Qf beteckna krökningsradierna för de
kurvor, som Pb och Pf beskriva, i ett godtyckligt
läge av punktsystemet.
För 0 = O äro Qb och Qf oändligt stora, och sy-
stemets rörelse sker rätlinigt i längdaxelns riktning.
Allteftersom 0 växer, avtaga Qb och Qf\ systemets
vridningscentrum närmar sig Pb för att samman-
falla med denna punkt, när 0 antager värdet .
u
Har 0 däremot ett konstant värde, roterar sy-
stemet kring en fast medelpunkt, eller ra. a. o. Pb
och Pf beskriva inbördes koncentriska cirkelbågar.
0 kan alltid uttryckas som någon funktion av x.
För det allmänna fallet antages, att
tg 9 = f (x)
och Pf äro:
Differentialekvationerna för kurvorna genom Pb
3J2
__ z
_ =f(x)
dx*
"m
(2 b)
Den allmänna lösningen är fullt analog för de
bägge fallen.
dx
d x
f (x) dx
dp
Cf(x] d x
Substituera –-/- = <p (x) och p = tg a
J l
j da . l
d p = -_- och T– = eosd«
cos2a [l -f ^2]3/2
f(x)dx
dit
/»> ____ *’ __
P==~dx~
- (cp(x}~
^
_______ -f-
y2.
(3 a)
(3 b)
. Om i utgångsläget Pb sammanfaller med origo,
längdaxeln med ^-axelns positiva riktning och rj-
axeln går genom Pf, försvinna konstanterna, och
ekvationerna antaga formen:
v®** ............(4a)
(4 b)
Genom att i dessa uttryck insätta 0 som någon
lämplig funktion av abskissan kan man be-
stämma övergångskurvor, som uppfylla önskade god-
tyckliga villkor. De härledda ekvationerna ha
emellertid i detta sammanhang enbart teoretiskt in-
tresse, då de leda till integraler, som icke kunna
uttryckas i elementära funktioner.
Av speciellt intresse är den kurva, som svarar
mot en med abskissan linjärt varierande styrvinkel.
Insattes 0 = hx i ekv. (4), blir resultatet ellip-
tiska integraler. För små vridningsvinklar förenklas
d y
emellertid grundformeln (2), - - kan försummas och
(Ju X
då motsvarande 0-värden även äro små, kan man
skriva
sin 0 = tg 0 = 0 == kx
d*y k x
dx*
"l
T
Lösningen ger kubiska parabler.
kx*
y =-
6Z
61
, (5 a)
, (5 b)
f (x) dx*’
För små vridningsvinklar är abskissan £5 båg-
längden. Om ett motorfordon alltså har konstant,
hastighet och ratten utsattes för en konstant vrid-
ningshastighet, sker dess rörelse vid små vridnings-
vinklar efter kubiska parabler.
Det har visat sig vara outförbart att ur ett givet
samband mellan styrvinkel och abskissa härleda den
<< prev. page << föreg. sida << >> nästa sida >> next page >>