
Full resolution (TIFF) - On this page / på denna sida - Häfte 2. Febr. 1934 - L. Johansson: Storleken av axelmomentet vid kortslutning av synkronmaskin direktkopplad till svänghjul
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
80
TEKNISK TIDSKRIFT
3 FEBR. 1934
ka axelns torsionsstyvhet,
(pi rotorns utslagsvinkel vid svängningsrörelsen
räknad från medelläget,
(f}2 svänghjulets utslagsvinkel vid
svängningsrörelsen räknad från medelläget.
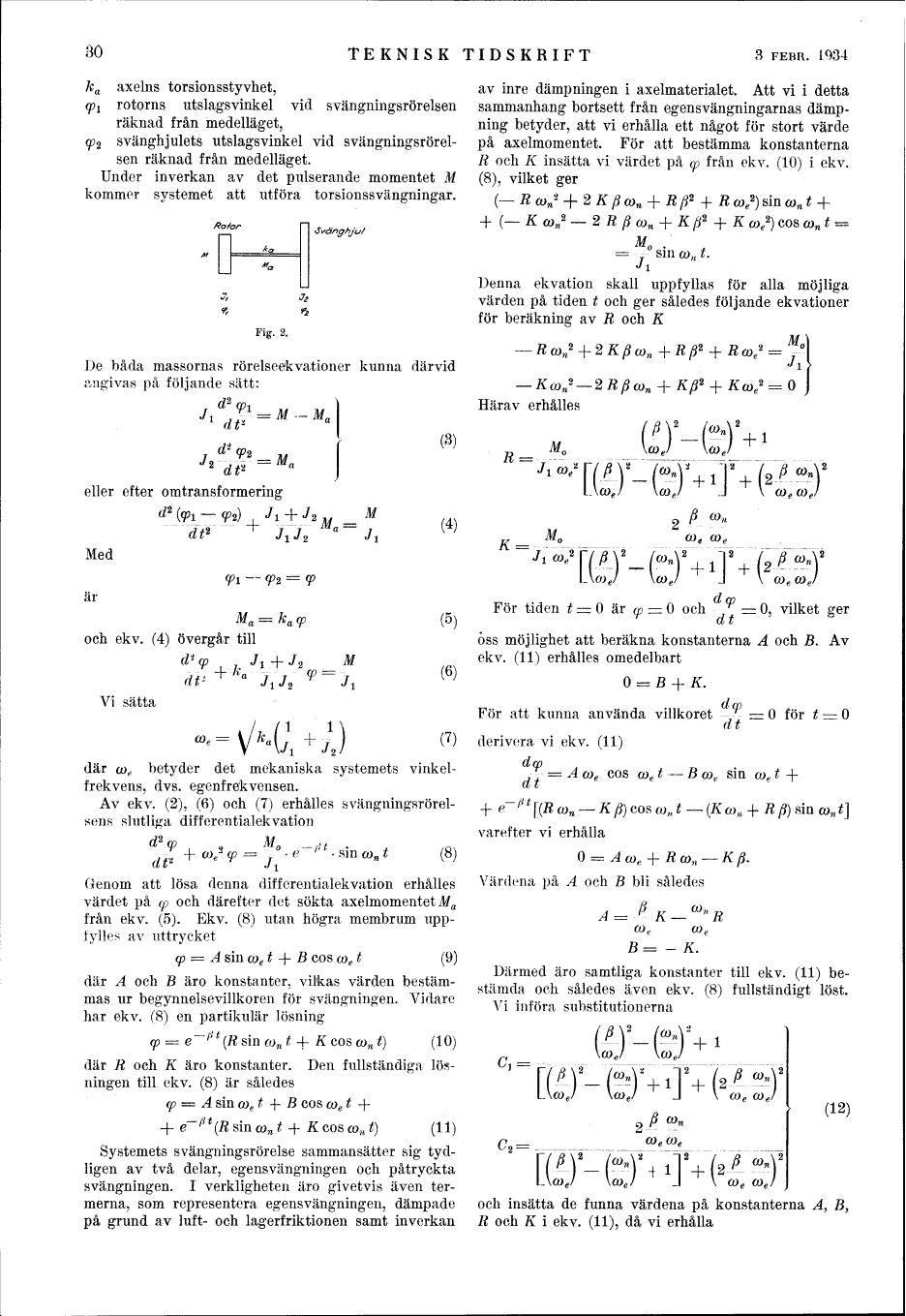
Under inverkan av det pulserande momentet M
kommer systemet att utföra torsionssvängningar.
Rö f or
Fig. 2.
De båda massornas rörelseekvationer kunna därvid
angivas på följande sätt:
d" g?2
J*"dii’ = Ma
eller efter omtransformering
^2 (9^1 - 9^2) J\ ~\~ J2
dt2 + Ji/2 ’
Med
är
och ekv. (4) övergår till
v,, + ka 7 - j " <P
fi T" J l J 2
Vi sätta
M
.(3)
(4)
M
J i
(6)
l
. +A
där coe betyder det mekaniska systemets
vinkelfrekvens, dvs. egenfrekvensen.
Av ekv. (2), (6) och (7) erhålles
svängningsröreisens slutliga differentialekvation
Genom att lösa denna differentialekvation erhålles
värdet på q> och därefter det sökta axelmomentet Ma
från ekv. (5). Ekv. (8) utan högra membrum
uppfylles av uttrycket
(p = A sin coet + B cos coe t (9)
där A och B äro konstanter, vilkas värden
bestämmas ur begynnelsevillkoren för svängningen. Vidare
har ekv. (8) en partikulär lösning
(p = e~/#*(Äsin cont 4- Kco$cont) (10)
där R och K äro konstanter. Den fullständiga
lösningen till ekv. (8) är således
cp = A sin coet -f B cos coet -f
-f- e~~/Jt(R sin con t -f K cos con t) (11)
Systemets svängningsrörelse sammansätter sig
tydligen av två delar, egensvängningen och påtryckta
svängningen. I verkligheten äro givetvis även
termerna, som representera egensvängningen, dämpade
på grund av luft- och lagerfriktionen samt inverkan
av inre dämpningen i axelmaterialet. Att vi i detta
sammanhang bortsett från egensvängningarnas
dämpning betyder, att vi erhålla ett något för stort värde
på axelmomentet. För att bestämma konstanterna
R och K insätta vi värdet på cp från ekv. (10) i ekv.
(8), vilket ger
(- RcOn2 + 2K/3con + Rfi2 + R co2) sin con t +
+ (- K con2 - 2 R fi con + K fi2 -f K co2) cos con t =
= T° sincont.
Ji
Denna ekvation skall uppfyllas för alla möjliga
värden på tiden t och ger således följande ekvationer
för beräkning av R och K
Mn
Härav erhålles
R =
MO
J l We
: M»
J l C0e
con
(O?
d<
För tiden t - O är 09 = O och ~ 0. vilket ger
T a £
oss möjlighet att beräkna konstanterna A och B. Av
ekv. (11) erhålles omedelbart
O = B + K.
^
För att kunna använda villkoret =0 för £ = O
dt
derivera vi ekv. (11)
dep
= Acoe cos coe t - B coe sin coet -f-
cos a)n t - (K coH + R fl) sin con t]
dt
+ ,-^[(Rcon
varefter vi erhålla
O = .
Värdena på A och B bli således
CDe O)e
B= - K.
Därmed äro samtliga konstanter till ekv. (11)
bestämda och således även ekv. (8) fullständigt löst.
Vi införa substitutionerna
r A)’_(*
L\COe/ \COg
co? coe
iT’.<M
coe coe/
och insätta de funna värdena på konstanterna A9 By
R och K i ekv. (11), då vi erhålla
(12)
<< prev. page << föreg. sida << >> nästa sida >> next page >>