
Full resolution (JPEG) - On this page / på denna sida - Häfte 11 ½. 23 mars 1939 - Matematiska maskiner i U. S. A., av Stig Ekelöf
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
vrider sig vinkeln dx, så flyttar sig tangeringspimkten
bågen y • dx, varför den vertikala skivan vrider sig
y ■ dx
inrEGeaToes
vinkeln
a
Fig. 11.
Principen
gratorn.
für inte-
Om den vertikala axeln vrider sig
vinkeln x, så vrider sig alltså den horisontella axeln
rv d x
vinkeln ––. Här kan y vara en viss funktion av
J «
x, y — † (x). Detta innebär, att kontaktpunktens
avstånd till den horisontella skivans medelpunkt
varierar från ögonblick till ögonblick efter en viss,
föreskriven lag. Vridningsvinkeln hos den horisontella
axeln ger tydligen f f (x) • d x i en viss skala. Att
märka är emellertid, att någon egentlig derivering ej
kan utföras av integratorn — den vertikala skivan
kan ej driva den
horisontella. Det är därför
i allmänhet nödvändigt
att omforma den givna
differentialekvationen,
innan den sättes upp i
maskinen.
Ä fig. 10 synas vidare
i bakgrunden sex st.
"input tables", medelst
vilka man i maskinen
inför en i kurvform given
funktion, t. e. en av
differentialekvationens koefficienter. Låt funktionen
ifråga vara y — † (x). Den å fig. synliga, tvärs över
bordet löpande bryggan drives då i æ-riktningen från
den axel i maskinen, som representerar variabeln x.
Samtidigt drives för hand medelst den nedtill till höger
å bordet synliga veven en släde tvärs över bryggan i
»/-riktningen på så sätt, att centrum av ett vid släden
fästat hårkors hela tiden följer den givna kurvan. Den
av veven drivna axelns rörelse överföres till maskinens
?y-axel, som då får en rörelse, som motsvarar
funktionen / [x). Man har även nyligen konstruerat en
fotoelektrisk "curve follower" [16], med vars hjälp
"input tables" skola kunna göras helautomatiska.
Den av maskinen givna lösningen erhålles uppritad
å ett bakom integratorerna synligt "output table".
Om lösningen är y = F (x), så drives en brygga över
bordet i æ-riktningen från maskinens æ-axel och ett
ritstift över bryggan i ^/-riktningen av maskinens y-axel.
Uppsättandet av ett problem består i princip i att
ett antal axlar hopkopplas i överensstämmelse med
den föreliggande ekvationen. En viss av dessa
hopkopplingar, som kan tänkas utförd sist, representerar
ekvationens likhetstecken. Då denna hopkoppling
utförts, blir hela systemet tvångsstyrt från axeln för
den oberoende variabeln. Denna drives med konstant
hastighet av en motor. Axeln för den beroende
variabeln roterar då i överensstämmelse med den sökta
lösningen.
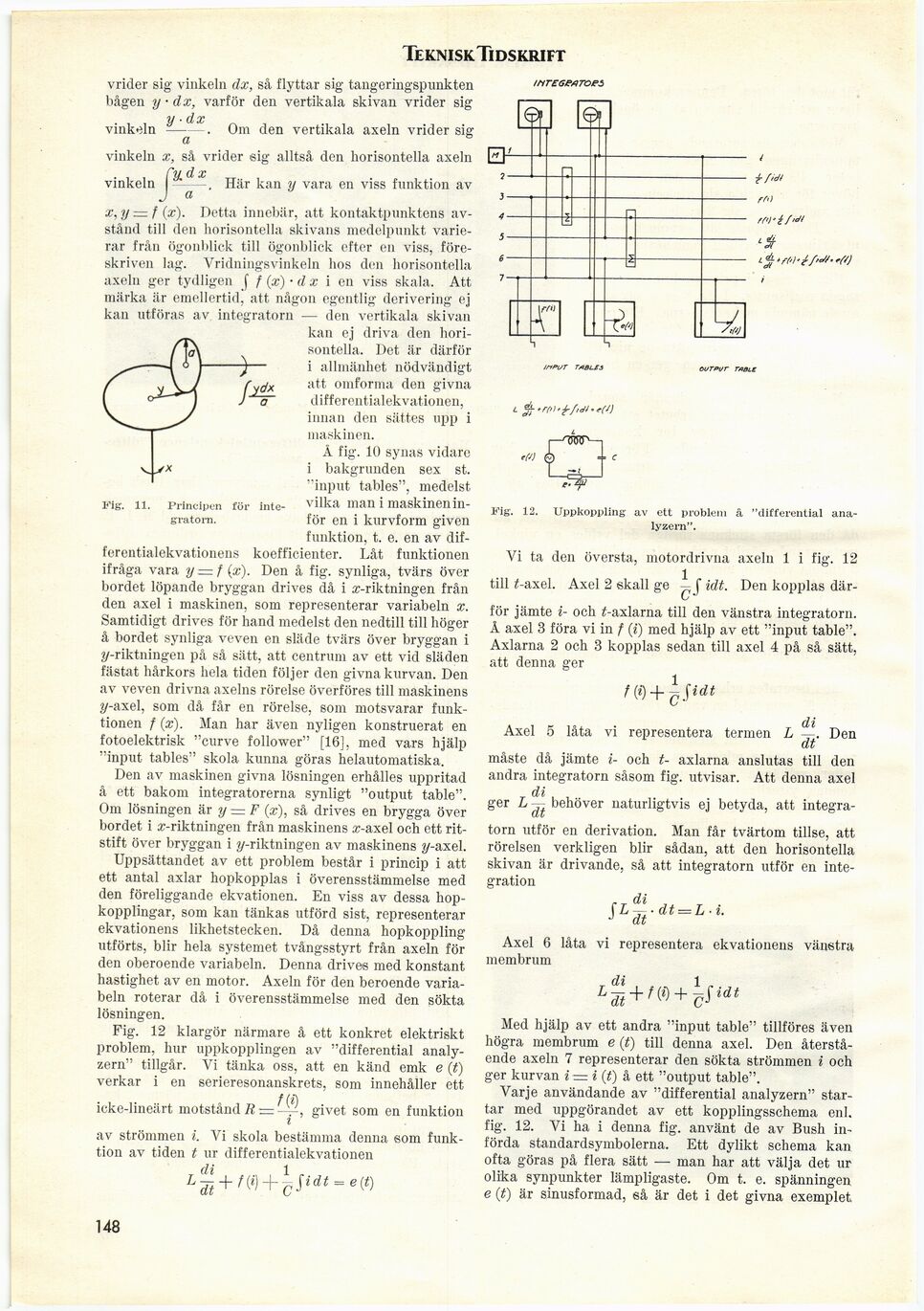
Fig. 12 klargör närmare å ett konkret elektriskt
problem, hur uppkopplingen av "differential
analy-zern" tillgår. Vi tänka oss, att en känd emk e (t)
verkar i en serieresonanskrets, som innehåller ett
f(i)
icke-lineärt motstånd il = givet som en funktion
av strömmen i. Vi skola bestämma denna som
funktion av tiden t ur differentialekvationen
di 1
L-rtJrf<j) + C$idt = e(t)
EF-
A"
/
tfM
rf)
fOl-if.JI
/>M
/rtfUT TABLEA
OUTPUT TABLE
Fig. 12. Uppkoppling av ett problem ä "differential
ana-lyzern".
Vi ta den översta, motordrivna axeln 1 i fig. 12
tilH-axel. Axel 2 skall ge ^ j~ id t. Den kopplas där-
för jämte i- och i-axlarna till den vänstra integratorn.
Å axel 3 föra vi in † (i) med hjälp av ett "input table".
Axlarna 2 och 3 kopplas sedan till axel 4 på så sätt,
att denna ger
1
f(i)+ jidt
di
Axel 5 låta vi representera termen L —. Den
dl
måste då jämte i- och t- axlarna anslutas till den
andra integratorn såsom fig. utvisar. Att denna axel
di
ger L — behöver naturligtvis ej betyda, att integra-
Q/O
torn utför en derivation. Man får tvärtom tillse, att
rörelsen verkligen blir sådan, att den horisontella
skivan är drivande, så att integratorn utför en
integration
SL^.ät-L.t.
Axel 6 låta vi representera ekvationens vänstra
membrum
Ldi + f®+C
$idt
Med hjälp av ett andra "input table" tillföres även
högra membrum e (t) till denna axel. Den
återstående axeln 7 representerar den sökta strömmen i och
ger kurvan i = i (t) å ett "output table".
Varje användande av "differential analyzern"
startar med uppgörandet av ett kopplingsschema enl.
fig. 12. Vi ha i denna fig. använt de av Bush
införda standardsymbolerna. Ett dylikt schema kan
ofta göras på flera sätt — man har att välja det ur
olika synpunkter lämpligaste. Om t. e. spänningen
e (t) är sinusformad, så är det i det givna exemplet
148
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}