
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskri ft
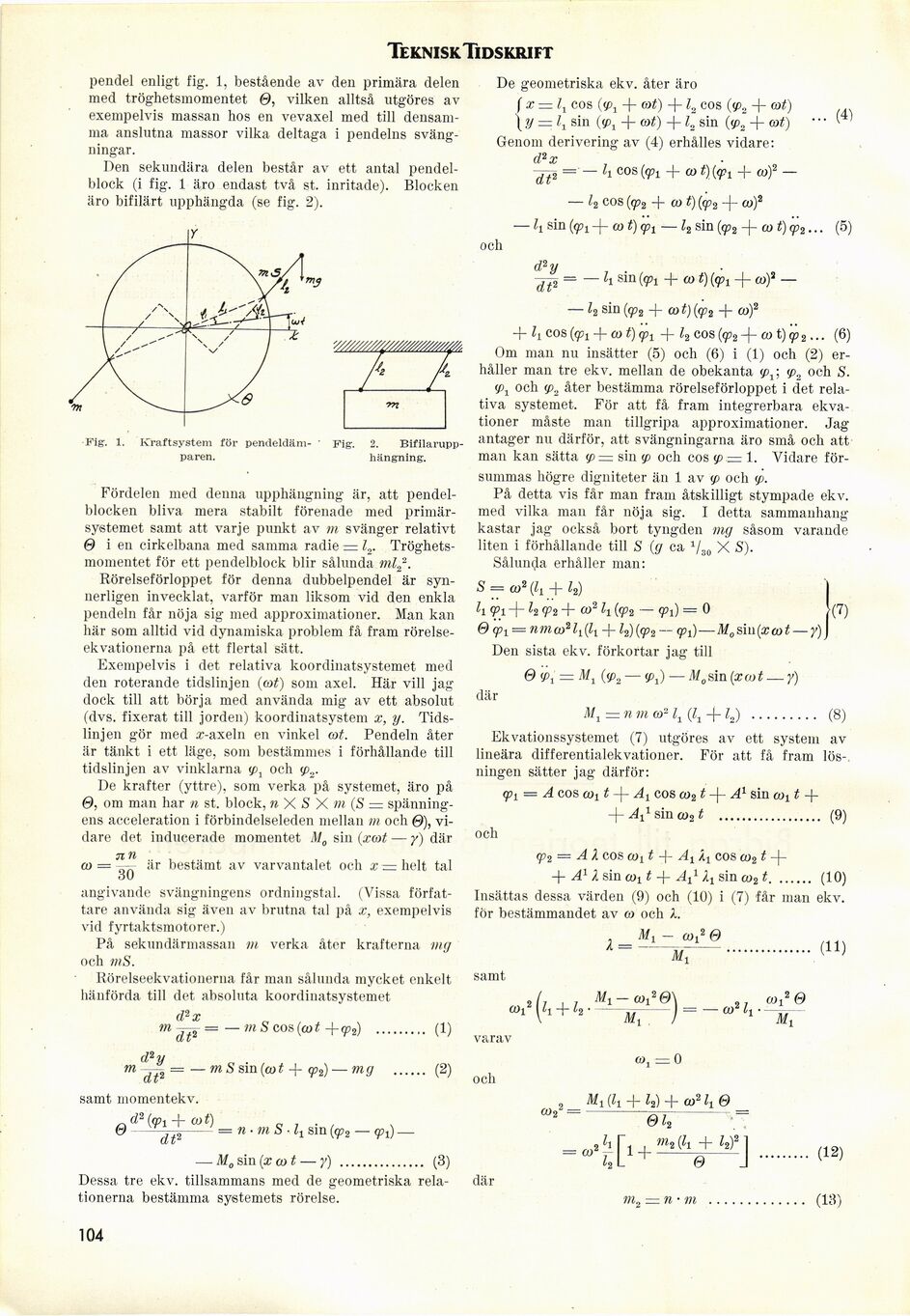
pendel enligt fig. 1, bestående av den primära delen
med tröghetsmomentet 0, vilken alltså utgöres av
exempelvis massan hos en vevaxel med till
densamma anslutna massor vilka deltaga i pendelns
svängningar.
Den sekundära delen består av ett antal
pendelblock (i fig. 1 äro endast två st. inritade). Blocken
äro bifilärt upphängda (se fig. 2).
Fördelen med denna upphängning är, att
pendelblocken bliva mera stabilt förenade med
primärsystemet samt att varje punkt av 111 svänger relativt
0 i en cirkelbana med samma radie = l2.
Tröghetsmomentet för ett pendelblock blir sålunda ml*.
Rörelseförloppet för denna dubbelpendel är
synnerligen invecklat, varför man liksom vid den enkla
pendeln får nöja sig med approximationer. Man kan
här som alltid vid dynamiska problem få fram
rörelseekvationerna på ett flertal sätt.
Exempelvis i det relativa koordinatsystemet med
den roterande tidslinjen [cat) som axel. Här vill jag
dock till att börja med använda mig av ett absolut
(dvs. fixerat till jorden) koordinatsystem x, y.
Tidslinjen gör med x-axeln en vinkel cot. Pendeln åter
är tänkt i ett läge, som bestämmes i förhållande till
tidslinjen av vinklarna <px och <p2.
De krafter (yttre), som verka på systemet, äro på
0, om man har n st. block, »XSX m (S =
spänningens acceleration i förbindelseleden mellan m och 0),
vidare det inducerade momentet M„ sin (xcot — y) där
co — ^ är bestämt av varvantalet och x = helt tal
ull
angivande svängningens ordningstal. (Vissa
författare använda sig även av brutna tal på x, exempelvis
vid fyrtaktsmotorer.)
På sekundärmassan m verka åter krafterna mg
och mS.
Rörelseekvationerna får man sålunda mycket enkelt
hänförda till det absoluta koordinatsystemet
m —„ = — m S eos (æt -\-cp2) ......... (1)
dt2
d2y
m = — mS sin(ft)£ -f cp2) — mg
(2)
samt momentekv.
d2((p1-Jt-wt)
Q –=n-mS-l1 sin (cp2 — q}t) —
— M0 sin (x to t — y) ............... (3)
Dessa tre ekv. tillsammans med de geometriska
relationerna bestämma systemets rörelse.
De geometriska ekv. åter äro
(x = l1 eos ((Pj + ojt) +12 eos (<p2 -f- cot)
\y — l1 sin ((fi1 at) -f- l2 sin (<p2 + at) • • • l ’
Genom derivering av (4) erhålles vidare:
d2x
— 2 =■ — h eos(95,. + cot) fa + cof —
— l2 eos (cp2 + cot) (cp2 -f cof
— lt sin (cpi -j- co t) cp1 — l2 sin (cp2 -f- co t) cp2... (5)
och
d2y .
— = — lx sm(cpi + co *)(<?! -f- co)1 —
— l2 sin (cp2 + cot) (cp2 -f cof
+ Ii eos((pi + cot)cp1 -f l2 eos (cp2 —j— co t)cp2 ... (6)
Om man nu insätter (5) och (6) i (1) och (2)
erhåller man tre ekv. mellan de obekanta <fix’, <p„ och S.
<p1 och <p2 åter bestämma rörelseförloppet i det
relativa systemet. För att få fram integrerbara
ekvationer måste man tillgripa approximationer. Jag
antager nu därför, att svängningarna äro små och att
man kan sätta <p= sin <p och eos <p = 1. Vidare
försummas högre digniteter än 1 av <p och <p.
På detta vis får man fram åtskilligt stympade ekv.
med vilka man får nöja sig. I detta sammanhang
kastar jag också bort tyngden mg såsom varande
liten i förhållande till S (g ca 1/30 X S).
Sålunda erhåller man:
S==co*(h + l2) j
h <P1 Jrh<P2+ (O2 h (cp2 — <pt) = 0 >(7)
@(pl — nmco2ll(li + l2){cp2 — (p1)—M0 sin (x co t — y) J
Den sista ekv. förkortar jag till
0 <px — Mt (<p2 — <pj) — M0sin (xcot — y)
där
M1 = n m co-lt -f l2) ......... (8)
Ekvationssystemet (7) utgöres av ett system av
lineära differentialekvationer. För att få fram lös-,
ningen sätter jag därför:
(pi = A eos co1t~l~A1 eos co2t + A1 sin &>i t -f-
-|- Aj1 sin co21 .................. (9)
och
tp2 = AA eos a>i t -f- A1 eos co2t -j-
-{- A1 k sin cox t -f Aj1 lx sin co21....... (10)
Insättas dessa värden (9) och (10) i (7) får man ekv.
för bestämmandet av ca och X.
M.-coSø
—m7—...............(11)
samt
varav
ca1== 0
och
M^h + h) + coH10
co22=-—–,=
......-<-)
där
m2 = n ■ m ............. (13)
104
Fig:. 1. Kraftsystem för
pendeldämparen.
Fig. 2.
Bifilarupp-hängning.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}