
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
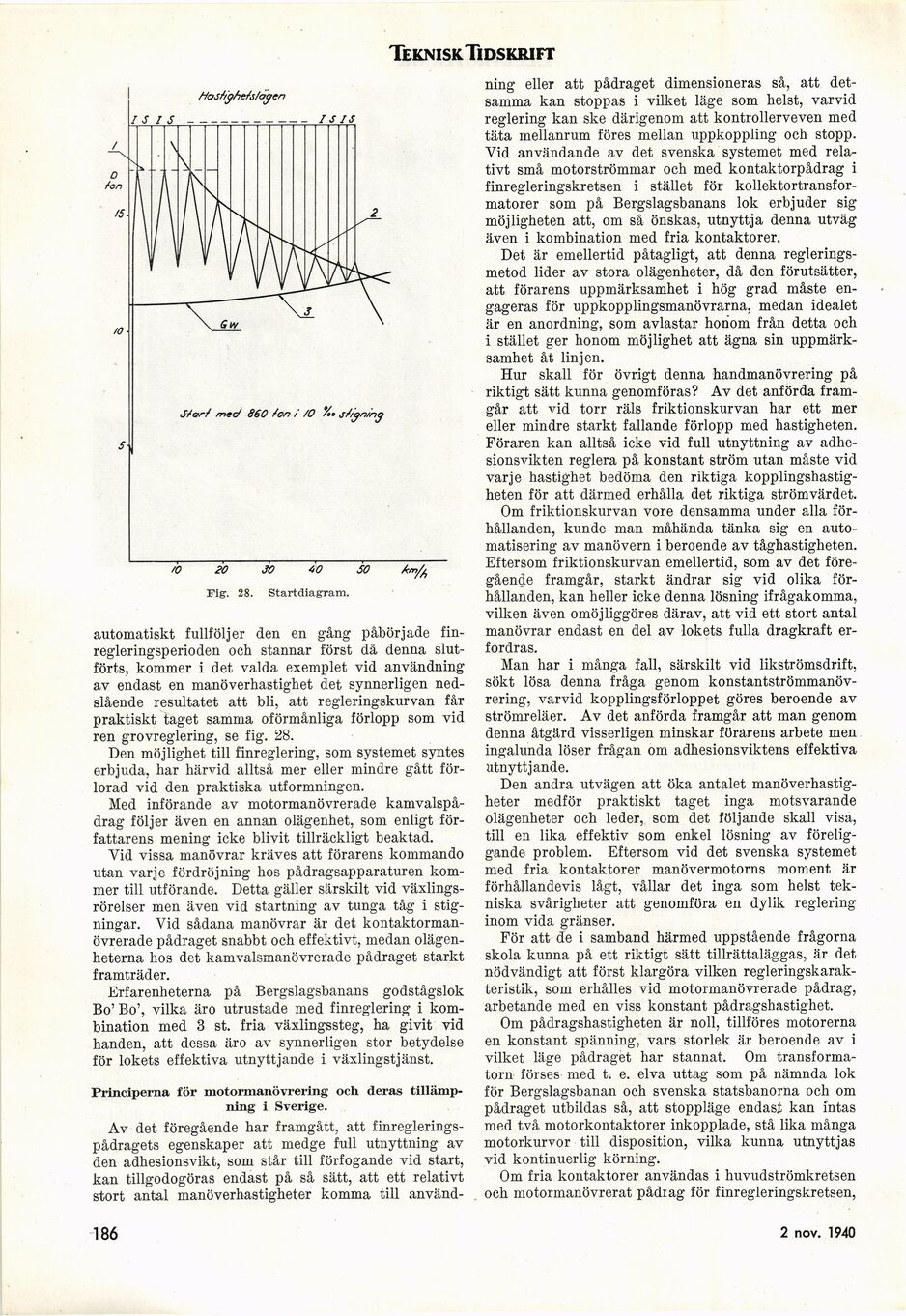
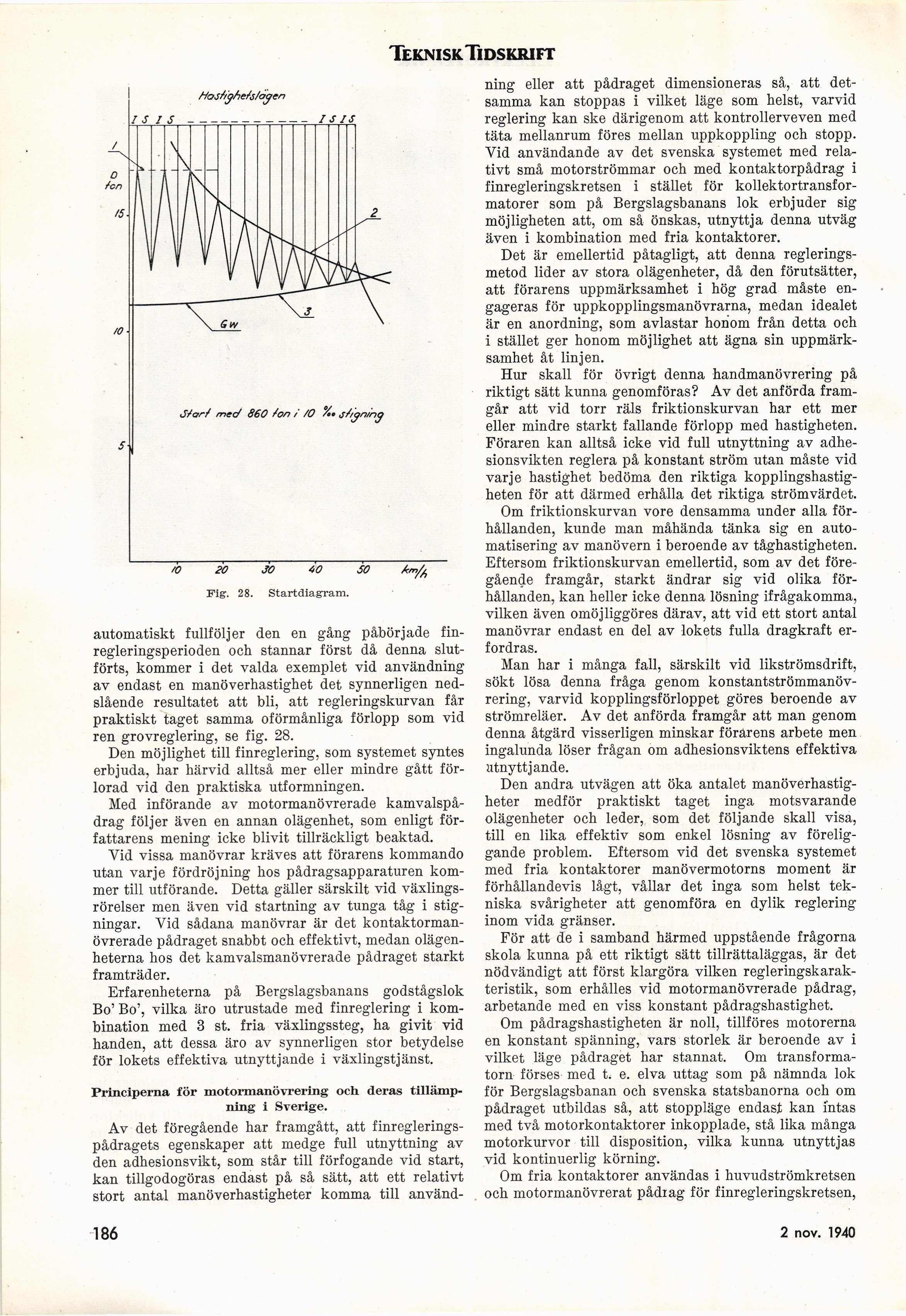
Hostigtie/s/àgen
ISIS–––––-ISIS
J/or/ med 860 /ön / /O j/igntng
’O 20 JO 40 50
Fig. 28. Startdiagram.
automatiskt fullföljer den en gång påbörjade
fin-regleringsperioden och stannar först då denna
slutförts, kommer i det valda exemplet vid användning
av endast en manöverhastighet det synnerligen
nedslående resultatet att bli, att regleringskurvan får
praktiskt taget samma oförmånliga förlopp som vid
ren grovreglering, se fig. 28.
Den möjlighet till finreglering, som systemet syntes
erbjuda, har härvid alltså mer eller mindre gått
förlorad vid den praktiska utformningen.
Med införande av motormanövrerade
kamvalspå-drag följer även en annan olägenhet, som enligt
författarens mening icke blivit tillräckligt beaktad.
Vid vissa manövrar kräves att förarens kommando
utan varje fördröjning hos pådragsapparaturen
kommer till utförande. Detta gäller särskilt vid
växlingsrörelser men även vid startning av tunga tåg i
stigningar. Vid sådana manövrar är det
kontaktorman-övrerade pådraget snabbt och effektivt, medan
olägenheterna hos det kamvalsmanövrerade pådraget starkt
framträder.
Erfarenheterna på Bergslagsbanans godstågslok
Bo’ Bo’, vilka äro utrustade med finreglering i
kombination med 3 st. fria växlingssteg, ha givit vid
handen, att dessa äro av synnerligen stor betydelse
för lokets effektiva utnyttjande i växlingstjänst.
Principerna för motormanövrering och deras
tillämpning i Sverige.
Av det föregående har framgått, att
finreglerings-pådragets egenskaper att medge full utnyttning av
den adhesionsvikt, som står till förfogande vid start,
kan tillgodogöras endast på så sätt, att ett relativt
stort antal manöverhastigheter komma till använd-
ning eller att pådraget dimensioneras så, att
detsamma kan stoppas i vilket läge som helst, varvid
reglering kan ske därigenom att kontrollerveven med
täta mellanrum föres mellan uppkoppling och stopp.
Vid användande av det svenska systemet med
relativt små motorströmmar och med kontaktorpådrag i
finregleringskretsen i stället för
kollektortransfor-matorer som på Bergslagsbanans lok erbjuder sig
möjligheten att, om så önskas, utnyttja denna utväg
även i kombination med fria kontaktorer.
Det är emellertid påtagligt, att denna
regleringsmetod lider av stora olägenheter, då den förutsätter,
att förarens uppmärksamhet i hög grad måste
engageras för uppkopplingsmanövrarna, medan idealet
är en anordning, som avlastar honom från detta och
i stället ger honom möjlighet att ägna sin
uppmärksamhet åt linjen.
Hur skall för övrigt denna handmanövrering på
riktigt sätt kunna genomföras? Av det anförda
framgår att vid torr räls friktionskurvan har ett mer
eller mindre starkt fallande förlopp med hastigheten.
Föraren kan alltså icke vid full utnyttning av
adhe-sionsvikten reglera på konstant ström utan måste vid
varje hastighet bedöma den riktiga
kopplingshastigheten för att därmed erhålla det riktiga strömvärdet.
Om friktionskurvan vore densamma under alla
förhållanden, kunde man måhända tänka sig en
automatisering av manövern i beroende av tåghastigheten.
Eftersom friktionskurvan emellertid, som av det
föregående framgår, starkt ändrar sig vid olika
förhållanden, kan heller icke denna lösning ifrågakomma,
vilken även ornöj liggöres därav, att vid ett stort antal
manövrar endast en del av lokets fulla dragkraft
erfordras.
Man har i många fall, särskilt vid likströmsdrift,
sökt lösa denna fråga genom
konstantströmmanöv-rering, varvid kopplingsförloppet göres beroende av
strömreläer. Av det anförda framgår att man genom
denna åtgärd visserligen minskar förärens arbete men
ingalunda löser frågan om adhesionsviktens effektiva
utnyttjande.
Den andra utvägen att öka antalet
manöverhastigheter medför praktiskt taget inga motsvarande
olägenheter och leder, som det följande skall visa,
till en lika effektiv som enkel lösning av
föreliggande problem. Eftersom vid det svenska systemet
med fria kontaktorer manövermotorns moment är
förhållandevis lågt, vållar det inga som helst
tekniska svårigheter att genomföra en dylik reglering
inom vida gränser.
För att de i samband härmed uppstående frågorna
skola kunna på ett riktigt sätt tillrättaläggas, är det
nödvändigt att först klargöra vilken
regleringskarakteristik, som erhålles vid motormanövrerade pådrag,
arbetande med en viss konstant pådragshastighet.
Om pådragshastigheten är noll, tillföres motorerna
en konstant spänning, vars storlek är beroende av i
vilket läge pådraget har stannat. Om
transformatorn förses med t. e. elva uttag som på nämnda lok
för Bergslagsbanan och svenska statsbanorna och om
pådraget utbildas så, att stoppläge endast kan intas
med två motorkontaktorer inkopplade, stå lika många
motorkurvor till disposition, vilka kunna utnyttjas
vid kontinuerlig körning.
Om fria kontaktorer användas i huvudströmkretsen
och motormanövrerat pådiag för finregleringskretsen,
186
2 nov. 1940
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}