
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
Monöverrnofortioafighej
Kbntrollerlåae I-n Vm
Kàntrol/erloqe I-2n Vm
KontroHer/rfge B’brt Vm
Kontrellerlåfie N-8n Vm
■eJ/er/Ogc 7-’Sn Vm
" - *WXn Vm
j utnyttjad oeeeterotionakroØ
j icke utnyttjad occe/erotiontkroft vid torr r
t... U • stort/ågen
/. TH• hoatighefs/äijcn
~lö lö ~üö 52 so** « 3Ö w ST* 6o c 3ö 60 lo o m lö 15 ~5ö so èo^A, 7ö 35 lö Zø ~5o xfø
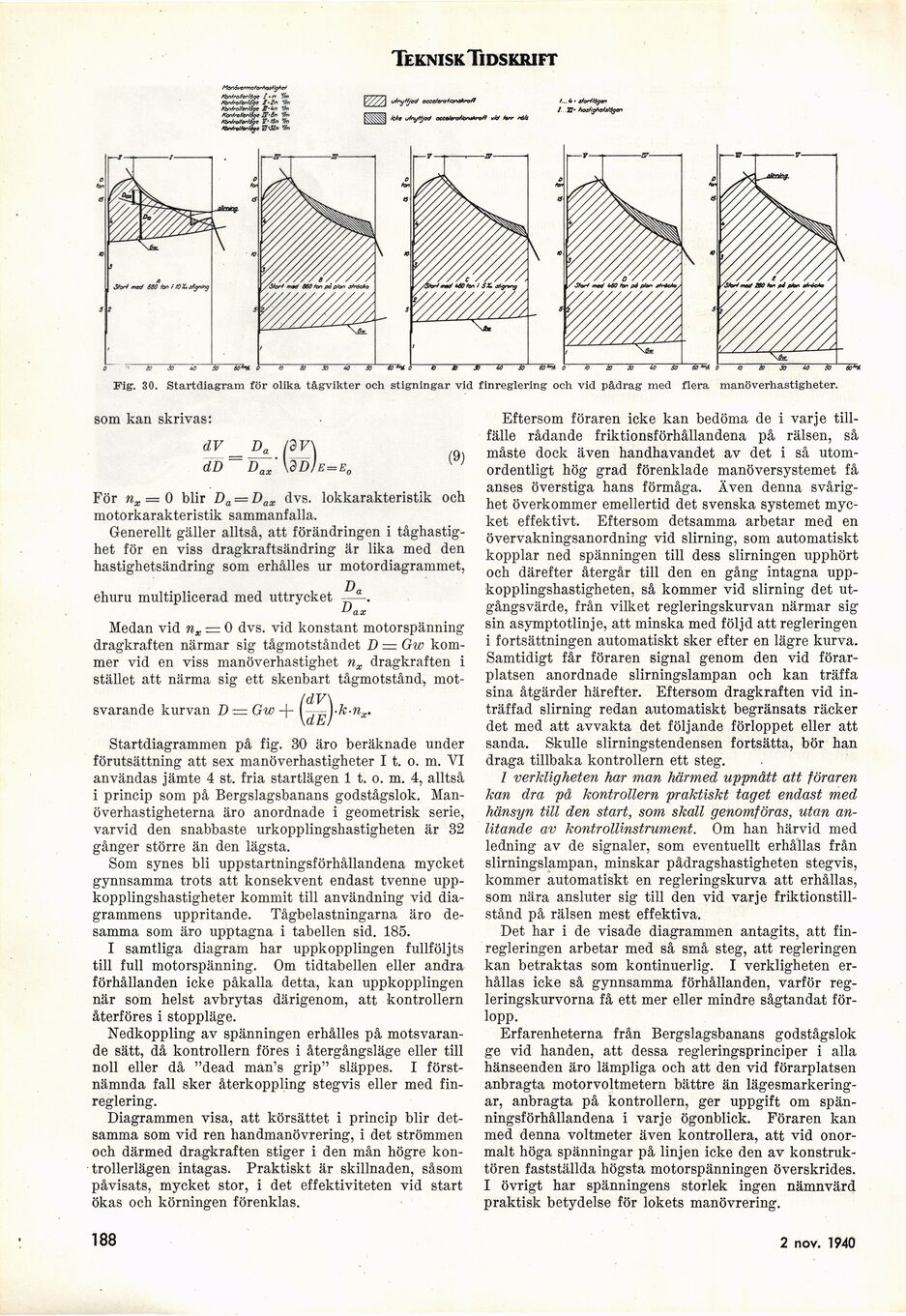
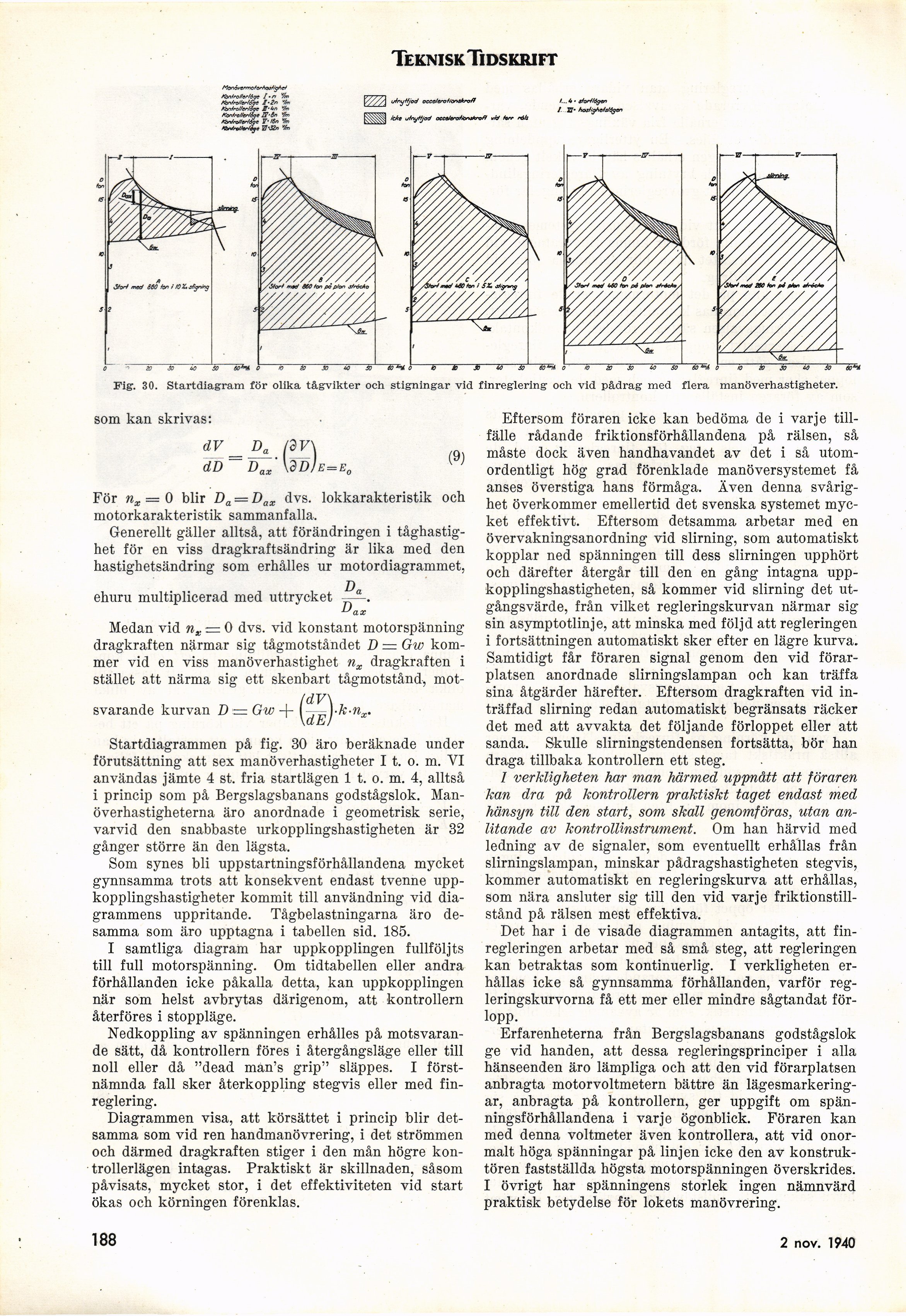
Fig1. 30. Startdiagram för olika tågvikter och stigningar vid finreglering och vid pådrag med flera manöverhastigheter.
som kan skrivas:
dV
dD
D« (dV\
D’\dDj
E = En
(9)
För nx — 0 blir Da = Dax dvs. lokkarakteristik och
motorkarakteristik sammanfalla.
Generellt gäller alltså, att förändringen i
tåghastighet för en viss dragkraftsändring är lika med den
hastighetsändring som erhålles ur motordiagrammet,
ehuru multiplicerad med uttrycket
U ax
Medan vid nx — 0 dvs. vid konstant motorspänning
dragkraften närmar sig tågmotståndet D = Gw
kommer vid en viss manöverhastighet nx dragkraften i
stället att närma sig ett skenbart tågmotstånd, mot-
svarande kurvan B — Gw +
CD-*-"-
Startdiagrammen på fig. 30 äro beräknade under
förutsättning att sex manöverhastigheter I t. o. m. VI
användas jämte 4 st. fria startlägen 1 t. o. m. 4, alltså
i princip som på Bergslagsbanans godstågslok.
Man-överhastigheterna äro anordnade i geometrisk serie,
varvid den snabbaste urkopplingshastigheten är 32
gånger större än den lägsta.
Som synes bli uppstartningsförhållandena mycket
gynnsamma trots att konsekvent endast tvenne
upp-kopplingshastigheter kommit till användning vid
diagrammens uppritande. Tågbelastningarna äro
desamma som äro upptagna i tabellen sid. 185.
I samtliga diagram har uppkopplingen fullföljts
till full motorspänning. Om tidtabellen eller andra
förhållanden icke påkalla detta, kan uppkopplingen
när som helst avbrytas därigenom, att kontrollern
återföres i stoppläge.
Nedkoppling av spänningen erhålles på
motsvarande sätt, då kontrollern föres i återgångsläge eller till
noll eller då "dead man’s grip" släppes. I
förstnämnda fall sker återkoppling stegvis eller med
finreglering.
Diagrammen visa, att körsättet i princip blir
detsamma som vid ren handmanövrering, i det strömmen
och därmed dragkraften stiger i den mån högre
kontrollerlägen intagas. Praktiskt är skillnaden, såsom
påvisats, mycket stor, i det effektiviteten vid start
ökas och körningen förenklas.
Eftersom föraren icke kan bedöma de i varje
tillfälle rådande friktionsförhållandena på rälsen, så
måste dock även handhavandet av det i så
utomordentligt hög grad förenklade manöversystemet få
anses överstiga hans förmåga. Även denna
svårighet överkommer emellertid det svenska systemet
mycket effektivt. Eftersom detsamma arbetar med en
övervakningsanordning vid slirning, som automatiskt
kopplar ned spänningen till dess slirningen upphört
och därefter återgår till den en gång intagna
uppkopplingshastigheten, så kommer vid slirning det
utgångsvärde, från vilket regleringskurvan närmar sig
sin asymptotlinje, att minska med följd att regleringen
i fortsättningen automatiskt sker efter en lägre kurva.
Samtidigt får föraren signal genom den vid
förarplatsen anordnade slirningslampan och kan träffa
sina åtgärder härefter. Eftersom dragkraften vid
inträffad slirning redan automatiskt begränsats räcker
det med att avvakta det följande förloppet eller att
sanda. Skulle slirningstendensen fortsätta, bör han
draga tillbaka kontrollern ett steg.
I verkligheten har man härmed uppnått att föraren
kan dra på kontrollern pi~aktiskt taget endast med
hänsyn till den start, som skall genomföras, utan
anlitande av kontrollinstrument. Om han härvid med
ledning av de signaler, som eventuellt erhållas från
slirningslampan, minskar pådragshastigheten stegvis,
kommer automatiskt en regleringskurva att erhållas,
som nära ansluter sig till den vid varje
friktionstillstånd på rälsen mest effektiva.
Det har i de visade diagrammen antagits, att
finregleringen arbetar med så små steg, att regleringen
kan betraktas som kontinuerlig. I verkligheten
erhållas icke så gynnsamma förhållanden, varför
regleringskurvorna få ett mer eller mindre sågtandat
förlopp.
Erfarenheterna från Bergslagsbanans godstågslok
ge vid handen, att dessa regleringsprinciper i alla
hänseenden äro lämpliga och att den vid förarplatsen
anbragta motorvoltmetern bättre än
lägesmarkeringar, anbragta på kontrollern, ger uppgift om
spänningsförhållandena i varje ögonblick. Föraren kan
med denna voltmeter även kontrollera, att vid
onormalt höga spänningar på linjen icke den av
konstruktören fastställda högsta motorspänningen överskrides.
I övrigt har spänningens storlek ingen nämnvärd
praktisk betydelse för lokets manövrering.
188
2 nov. 1940
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}