
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
77T7T
Följande ekvationer erhållas:
(1’)
l^^^rTTTlTrTTiTrrrÅrl [
t5
X y z
£ 1 ß du dz
v —ß i dv dz
C du dz dv dz 1
M„
i/a i/a
(|-z]Jgzdz+jW-*)
’/z^Z
S h
22
sid — u)
+ qz(Z — z)dZ
(2’)
M;
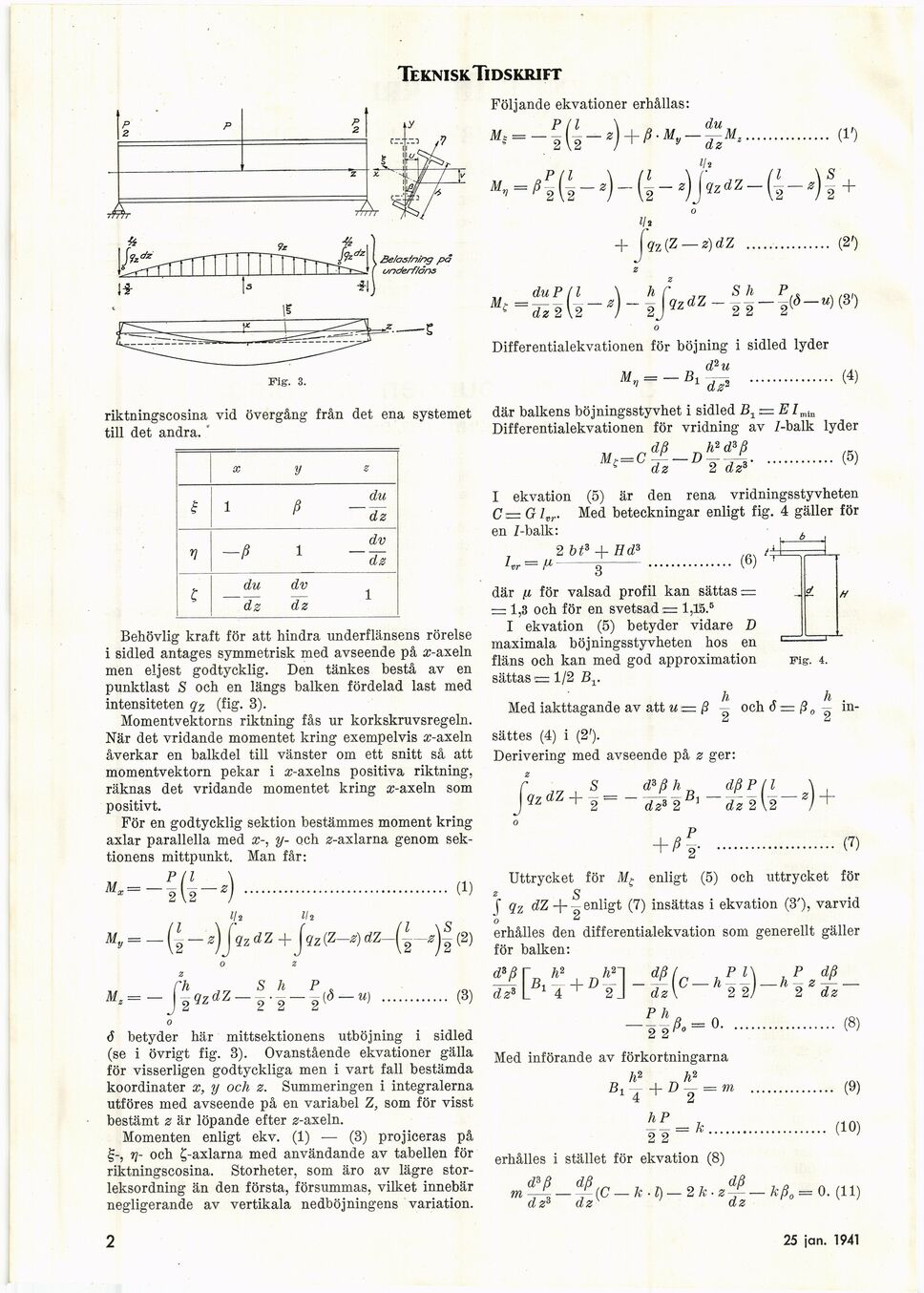
Fig. 3.
riktningscosina vid övergång från det ena systemet
till det andra.’
Differentialekvationen för böjning i sidled lyder
............... (4)
Mn
dz2
■ E Imi„
där balkens böjningsstyvhet i sidled B1
Differentialekvationen för vridning av /-balk lyder
Mt=C
dß h2 d3ß
ciz ~2~dz3’
(5)
I ekvation (5) är den rena vridningsstyvheten
C —G lvr. Med beteckningar enligt fig. 4 gäller för
en /-balk: A
_ 2 b t3 Hd3
— o ..........
(6) V
Behövlig kraft för att hindra underflänsens rörelse
i sidled antages symmetrisk med avseende på æ-axeln
men eljest godtycklig. Den tänkes bestå av en
punktlast S och en längs balken fördelad last med
intensiteten qz (fig. 3).
Momentvektorns riktning fås ur korkskruvsregeln.
När det vridande momentet kring exempelvis æ-axeln
åverkar en balkdel till vänster om ett snitt så att
momentvektorn pekar i z-axelns positiva riktning,
räknas det vridande momentet kring æ-axeln som
positivt.
För en godtycklig sektion bestämmes moment kring
axlar parallella med x-, y- och ø-axlarna genom
sektionens mittpunkt. Man får:
där fi för valsad profil kan sättas =
= 1,3 och för en svetsad = 1,1S.6
I ekvation (5) betyder vidare D
maximala böjningsstyvheten hos en
fläns och kan med god approximation
sättas = 1/2 Bv
h
Med iakttagande av att u = "
Fig. 4.
2 och 6 = ß0 - in-
sättes (4) i (2’).
Derivering med avseende på z ger:
qzdZ+ g =
d3ß h
dz3 2
B,
dlP(l—z
dz 2\2
)+
(7)
(1)
)>
(3)
Uttrycket för M: enligt (5) och uttrycket för
2 S
f qz dZ + — enligt (7) insättas i ekvation (3’), varvid
o %
erhålles den differentialekvation som generellt gäller
för balken:
d3ß
dz3
+ D2-J
<5 betyder här mittsektionens utböjning i sidled
(se i övrigt fig. 3). Ovanstående ekvationer gälla
för visserligen godtyckliga men i vart fall bestämda
koordinater x, y och z. Summeringen i integralerna
utföres med avseende på en variabel Z, som för visst
bestämt z är löpande efter ø-axeln.
Momenten enligt ekv. (1) — (3) projiceras på
rj- och ^-axlarna med användande av tabellen för
riktningscosina. Storheter, som äro av lägre
storleksordning än den första, försummas, vilket innebär
negligerande av vertikala nedböjningens variation.
dß(c hpl
~ ~dz\ 2 2
Phn n
-2 2Ä==0-
)-
hPzdl
2 Z dz
(8)
Med införande av förkortningarna
h2 „ h2
B,
_ 4- B — - = m
4 2
hP
= k,
2 2
erhålles i stället för ekvation (8)
• (9)
(10)
m
d3ß dß
dß
dz3
(C _ k ■ l) — 2 k ■ z ,
dz dz
kß0 = 0. (11)
2
25 jan. 1941
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}