
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Skeppsbyggnadskonst och Flygteknik
eller
då ds
: -|–-. • t,, = • l f,
at
dt
framgår, att för plötsliga ändringar i den styrande
storheten kommer återföringsimpulsen att noggrant
avspegla denna ändring, medan vid långsammare
ändringar återföringsimpulsen kommer att närma sig ett
värde, som svarar mot den styrande storhetens
tids-derivata. Närmandet sker då efter en
exponential-kurva, given av återföringskretsens tidskonstant rå.
Återföringens tidsegenskaper gives av rå och dess
styrka av värdet på T å. På detta sätt kommer
återföringsimpulsen att vara ett mellanting mellan den
styrande storhetens avvikelse från
utgångstillståndet och samma storhets derivata och utgör därför en
utomordentligt lämplig stabiliserande eller
återförande storhet. Den siktar så att säga fram i tiden,
tagande hänsyn till att den efterföljande reglerade
storheten (t. e. en generatorspänning, varvtalet
hos en svängmassa) först efter en viss tid uppnår
det rätta värdet. För att på snabbaste sätt nå detta,
skall det mellanliggande ledet ha möjlighet att
överreglera. I rätt tid skall dock erhållas en
korrigerande impuls, så att samtliga storheter samtidigt
uppnå sina korrekta värden för det nya
belastningstill-ståndet, och detta samtidigt som den eller de
återförande impulserna äro lika med 0.
För att
åstadkomma den snabbhet och
noggrannhet i
regleringen, som är
erforderlig för
hastighets-reglering av
löpvagnen vid Statens [-skeppsprovningsan-stalt,-]
{+skeppsprovningsan-
stalt,+} har
snabbregulatorn utförts med en
eller
PTS
pTS+1
d/s _
~df °
a
= a
da
dt
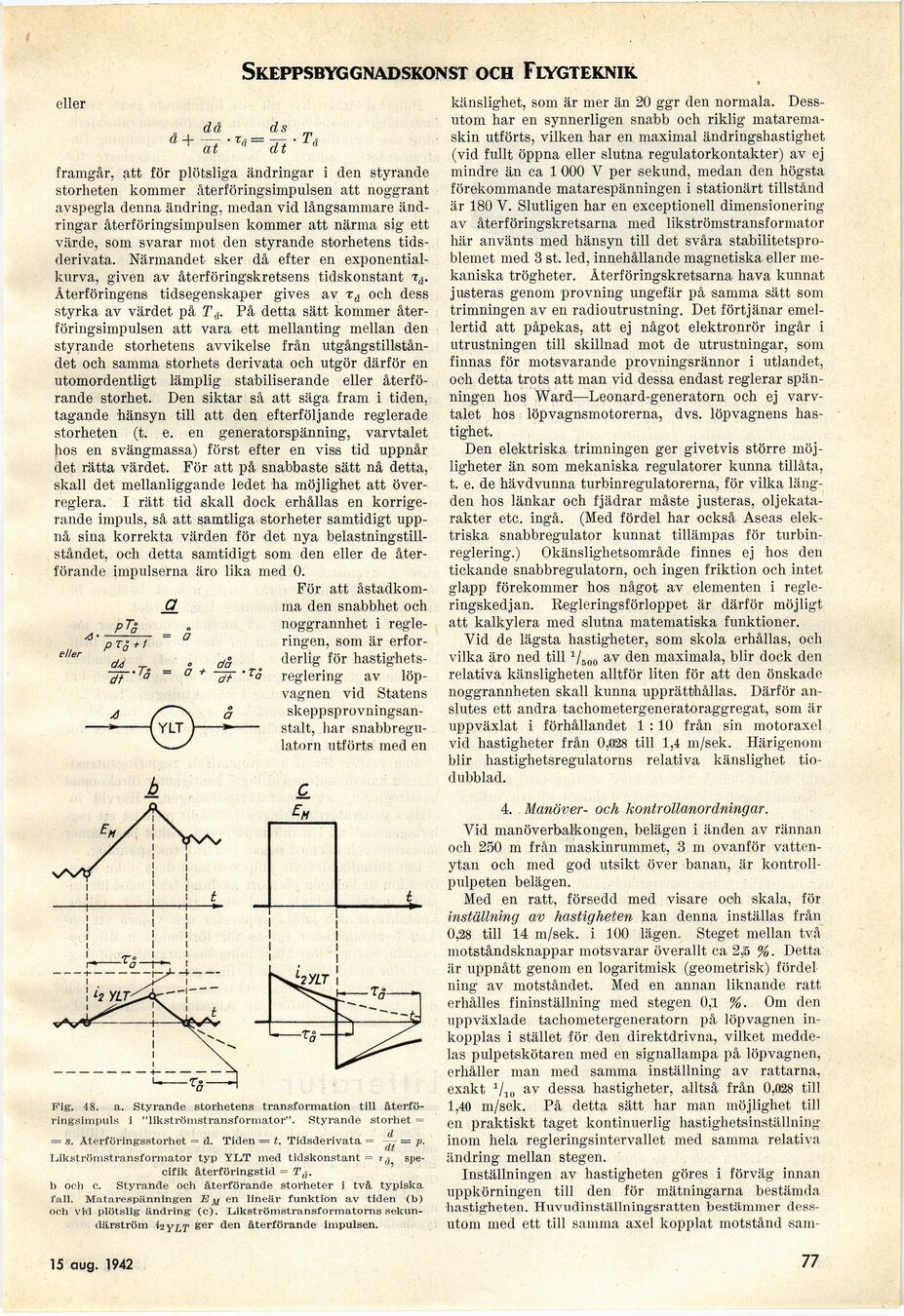
Fig. 48. a. Styrande storhetens transformation till
återfö-ringsimpuls i "likströmstransformator". Styrande storhet 7
= s. Ätérföringsstorhet = à. Tiden = t. Tidsderivata = ~ = p.
Likströmstransformator typ YL.T med tidskonstant = i(jj
specifik återföringstid =
b och c. Styrande och återförande storheter i två typiska
fall. Matarespänningen E y en lineal* funktion av tiden (b)
och viel plötslig ändring (c). Läkströmstransformatorns
sekundärström teyLT ger den återförande impulsen.
känslighet, som är mer än 20 ggr den normala.
Dessutom har en synnerligen snabb och riklig
mataremaskin utförts, vilken har en maximal ändringshastighet
(vid fullt öppna eller slutna regulatorkontakter) av ej
mindre än ca 1 000 V per sekund, medan den högsta
förekommande matarespänningen i stationärt tillstånd
är 180 Y. Slutligen har en exceptionell dimensionering
av återföringskretsarna med likströmstransformator
här använts med hänsyn till det svåra
stabilitetsproblemet med 3 st. led, innehållande magnetiska eller
mekaniska trögheter. Återföringskretsarna hava kunnat
justeras genom provning ungefär på samma sätt som
trimningen av en radioutrustning. Det förtjänar
emellertid att påpekas, att ej något elektronrör ingår i
utrustningen till skillnad mot de utrustningar, som
finnas för motsvarande provningsrännor i utlandet,
ooh detta trots att man vid dessa endast reglerar
spänningen hos Ward—Leonard-generatorn och ej
varvtalet hos löpvagnsmotorerna, dvs. löpvagnens
hastighet.
Den elektriska trimningen ger givetvis större
möjligheter än som mekaniska regulatorer kunna tillåta,
t. e. de hävdvunna turbinregulatorerna, för vilka
längden hos länkar och fjädrar måste justeras,
oljekata-rakter etc. ingå. (Med fördel har också Aseas
elektriska snabbregulator kunnat tillämpas för
turbin-reglering.) Okänslighetsområde finnes ej hos den
tickande snabbregulatorn, och ingen friktion och intet
glapp förekommer hos något av elementen i
regleringskedjan. Regleringsförloppet är därför möjligt
att kalkylera med slutna matematiska funktioner.
Yid de lägsta hastigheter, som skola erhållas, och
vilka äro ned till 1/500 av den maximala, blir dock den
relativa känsligheten alltför liten för att den önskade
noggrannheten skall kunna upprätthållas. Därför
anslutes ett andra tachometergeneratoraggregat, som är
uppväxlat i förhållandet 1 :10 från sin motoraxel
vid hastigheter från 0,ö28 till 1,4 m/sek. Härigenom
blir hastighetsregulatorns relativa känslighet
tiodubblad.
4. Manöver- och kontrollanordningar.
Vid manöverbalkongen, belägen i änden av rännan
och 250 m från maskinrummet, 3 m ovanför
vattenytan och med god utsikt över banan, är
kontroll-pulpeten belägen.
Med en ratt, försedd med visare och skala, för
inställning av hastigheten kan denna inställas från
0,28 till 14 m/sek. i 100 lägen. Steget mellan två
motståndsknappar motsvarar överallt ca 2,5 %. Detta
är uppnått genom en logaritmisk (geometrisk) fördel
ning av motståndet. Med en annan liknande ratt
erhålles fininställning med stegen 0,1 %. Om den
uppväxlade tachometergeneratorn på löpvagnen
inkopplas i stället för den direktdrivna, vilket
meddelas pulpetskötaren med en signallampa på löpvagnen,
erhåller man med samma inställning av rattarna,
exakt V-lo av dessa hastigheter, alltså från 0,tt28 till
1,40 m/sek. På detta sätt har man möjlighet till
en praktiskt taget kontinuerlig hastighetsinställning
inom hela regleringsintervallet med samma relativa
ändring mellan stegen.
Inställningen av hastigheten göres i förväg innan
uppkörningen till den för mätningarna bestämda
hastigheten. Huvudinställningsratten bestämmer
dessutom med ett till samma axel kopplat motstånd sam-
15 aug. 1942
77
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}