
Full resolution (JPEG) - On this page / på denna sida - H. 48. 2 december 1944 - Automatisk kalkylator för regleringsändamål, av Einar Welin och Stig Djure
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
2 december 1944
1395
värde. För sådana funktioner är det olämpligt
att tillgripa speciellt stora räknetallrikar, som
avvika från de omgivande, utan där är det
lämpligare att öka noggrannheten för de små värdena
på bekostnad av noggrannheten för de stora.
En sådan icke-linearitet kan erhållas genom att
breda ut funktionen över ett större antal
kontaktlameller i dess ena ände och att tränga ihop den i
motsvarande grad i den andra änden, varför den
elektriska icke-lineariteten alltid måste åtföljas av
en motsvarande mekanisk icke-linearitet hos den
utgående rörelsen. Denna mekaniska
icke-lineari-tet kan utföras exempelvis med ett länksystem
enligt fig. 18, där de båda armarna i början ha
ett visst kopplingsförhållande, men där i slutet
av rörelsen den drivande armen nära nog går
över centrum, så att kontaktarmen erhåller en
proportionsvis mycket liten rörelse.
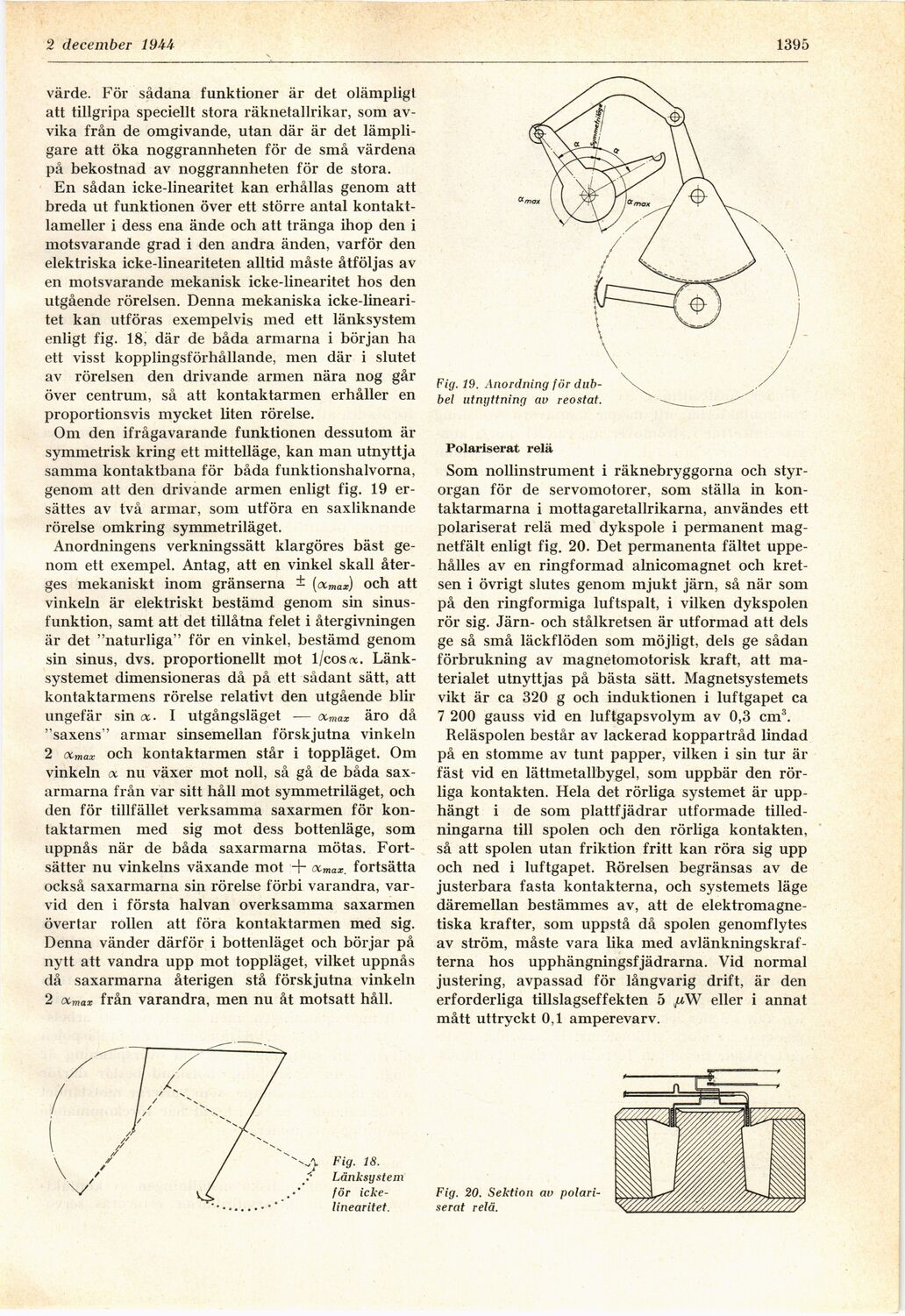
Om den ifrågavarande funktionen dessutom är
symmetrisk kring ett mittelläge, kan man utnyttja
samma kontaktbana för båda funktionshalvorna,
genom att den drivande armen enligt fig. 19
er-sättes av två armar, som utföra en saxliknande
rörelse omkring symmetriläget.
Anordningens verkningssätt klargöres bäst
genom ett exempel. Antag, att en vinkel skall
återges mekaniskt inom gränserna - (ccmax) och att
vinkeln är elektriskt bestämd genom sin
sinusfunktion, samt att det tillåtna felet i återgivningen
är det "naturliga" för en vinkel, bestämd genom
sin sinus, dvs. proportionellt mot l/cosa.
Länksystemet dimensioneras då på ett sådant sätt, att
kontaktarmens rörelse relativt den utgående blir
ungefär sin oc. I utgångsläget — ocmax äro då
"saxens" armar sinsemellan förskjutna vinkeln
2 ocmax och kontaktarmen står i toppläget. Om
vinkeln a nu växer mot noll, så gå de båda
saxarmarna från var sitt håll mot symmetriläget, och
den för tillfället verksamma saxarmen för
kontaktarmen med sig mot dess bottenläge, som
uppnås när de båda saxarmarna mötas.
Fortsätter nu vinkelns växande mot + OCmax. fortsätta
också saxarmarna sin rörelse förbi varandra,
varvid den i första halvan overksamma saxarmen
övertar rollen att föra kontaktarmen med sig.
Denna vänder därför i bottenläget och börjar på
nytt att vandra upp mot toppläget, vilket uppnås
då saxarmarna återigen stå förskjutna vinkeln
2 ocmax från varandra, men nu åt motsatt håll.
Fig. 19. Anordning för
dubbel utnyttning av reostat.
Polariserat relä
Som nollinstrument i räknebryggorna och
styrorgan för de servomotorer, som ställa in
kontaktarmarna i mottagaretallrikarna, användes ett
polariserat relä med dykspole i permanent
magnetfält enligt fig. 20. Det permanenta fältet
uppehälles av en ringformad alnicomagnet och
kretsen i övrigt slutes genom mjukt järn, så när som
på den ringformiga luftspalt, i vilken dykspolen
rör sig. Järn- och stålkretsen är utformad att dels
ge så små läckflöden som möjligt, dels ge sådan
förbrukning av magnetomotorisk kraft, att
materialet utnyttjas på bästa sätt. Magnetsystemets
vikt är ca 320 g och induktionen i luftgapet ca
7 200 gauss vid en luftgapsvolym av 0,3 cm3.
Reläspolen består av lackerad koppartråd lindad
på en stomme av tunt papper, vilken i sin tur är
fäst vid en lättmetallbygel, som uppbär den
rörliga kontakten. Hela det rörliga systemet är
upphängt i de som plattfjädrar utformade
tilledningarna till spolen och den rörliga kontakten,
så att spolen utan friktion fritt kan röra sig upp
och ned i luftgapet. Rörelsen begränsas av de
justerbara fasta kontakterna, och systemets läge
däremellan bestämmes av, att de
elektromagnetiska krafter, som uppstå då spolen genomflytes
av ström, måste vara lika med
avlänkningskraf-terna hos upphängningsfjädrarna. Vid normal
justering, avpassad för långvarig drift, är den
erforderliga tillslagseffekten 5 /AV eller i annat
mått uttryckt 0,1 amperevarv.
Fig. 18.
Länksystem
för
icke-linearitet.
Fig. 20. Sektion av
polariserat relä.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}