
Full resolution (JPEG) - On this page / på denna sida - H. 50. 14 december 1946 - Analytisk lösning av enbildsfotogrammetrins huvudproblem, av R S Halonen
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
1A december 19A6
1293
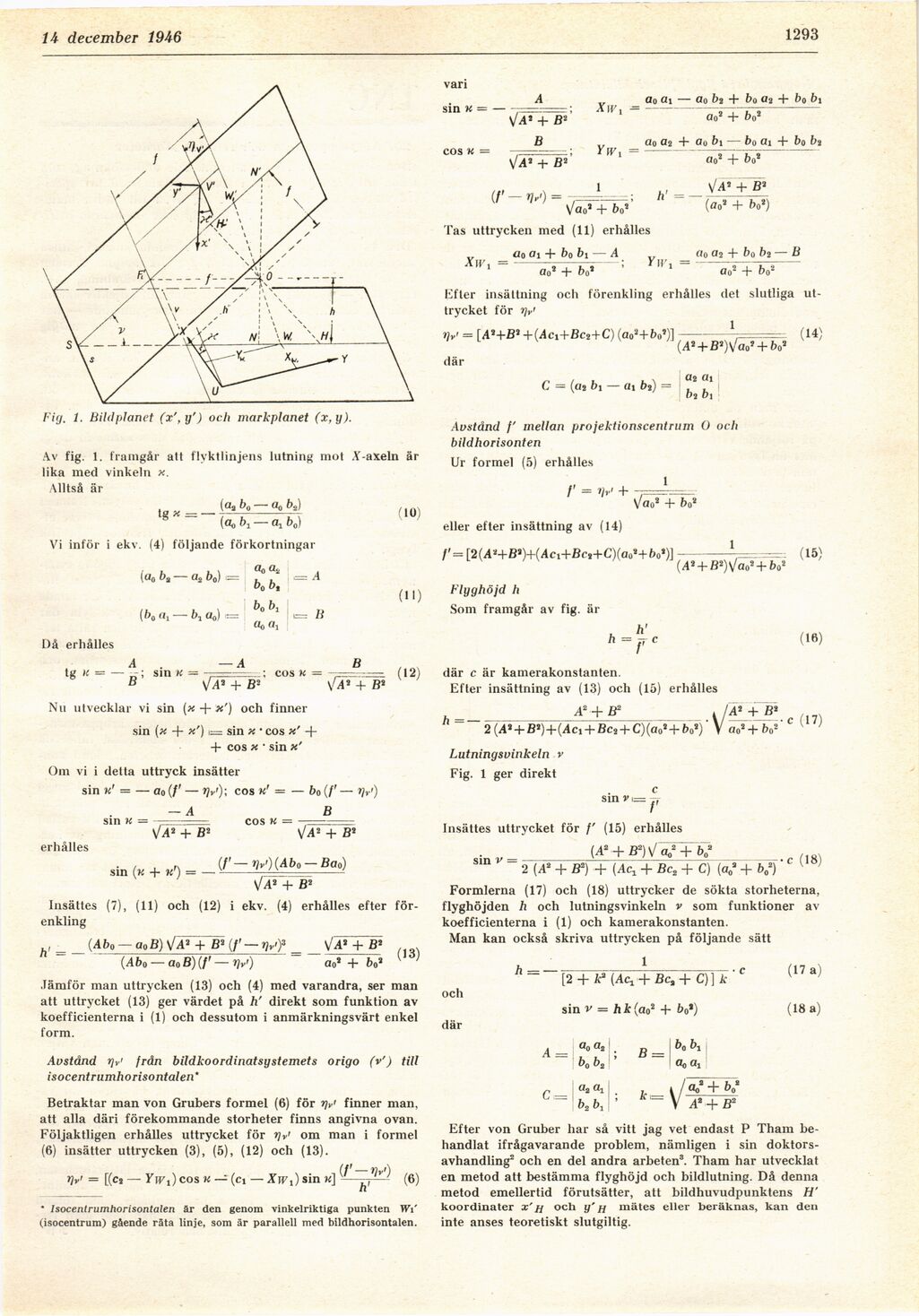
Fig. 1. Bildplanet (x’,y’) och markplanet (x,y).
Av fig. 1. framgår att flyktlinjens lutning mot .Y-axeln är
lika med vinkeln x.
Alltså är
t__(cta b0 — Oq ba)
* ~ (a0b1 — a1 b0)
Vi inför i ekv. (4) följande förkortningar
lü
(a0 ba — a.2 b0) e=
b0 b,
A
i t , > b0bj
(b0a1 — bao0) i= i= B
Då erhålles
tg K = —
A . —A
sin k = ––-; eos k —
B \[A2 + B2
B
\/Ä» + B2
Nu utvecklar vi sin + och finner
sin (« + «’) sin x • eos +
+ eos x • sin
Om vi i detta uttryck insätter
sin k’ — — a0 (/’ — rjv’); eos «’ = — b0 (/’ — »?,•’)
(•I)
(12)
erhålles
— ^
sin k — -
VA2 + B2
sin (k + «’)
eos K -
B
\JA2 + B2
(/’ — Vv’) (Abo — Bao)
VA2 + B2
Insättes (7), (11) och (12) i ekv. (4) erhålles efter
förenkling
., __(A bp — apB) \Ja2 + B2 (/’ — J?v’)3 _ SJA* + B*
(Abo — aoB]if — w)
a o2 + bo2
(13)
Jämför man uttrycken (13) och (4) med varandra, ser man
att uttrycket (13) ger värdet på h’ direkt som funktion av
koefficienterna i (1) och dessutom i anmärkningsvärt enkel
form.
Avstånd r\v< från bildkoordinatsystemets origo (v’) till
isocentrumhorisontalen*
Betraktar man von Grubers formel (6) för r\v’ finner man,
att alla däri förekommande storheter finns angivna ovan.
Följaktligen erhålles uttrycket för rjv’ om man i formel
(6) insätter uttrycken (3), (5), (12) och (13).
/■/’_yl
r\v’ = [(c, — Ywx) eos u — (cx — Xwx) sin k] , ; (6)
* Isocentrumhorisontalen är den genom vinkelriktiga punkten Wi’
(isocentrum) gående räta linje, som är parallell med bildhorisontalen.
vari
sin k = —
VÄHbß*
B
\/A2 + B2’
(f-V)
X w i -=
Ywx =
l
Oo at — ao bi + bo ai + b0 b i
~ ao2 + b,,2
a o a2 + a0 bi — bo ai + bo ba
\/ao2 + bo2’
Tas uttrycken med (11) erhålles
a0 oi + bo bi — A
ti =
XWl
a02 + bo2
yiFi =
ao2 + bo2
_ V’A2 + B1
~ (öo2 + bo2)
flo a2 + bo b2 — B
Oo2 + bo2
Efter insättning och förenkling erhålles det slutliga
uttrycket för r]v’
Vv’ = [A2+B2 + (Aci+Bc2+C) (ao2+bo2)] , _ ,—= (14)
där
C = («2 bi — ai b2) =
(A2 + B2)vV + bo2
02 öl
b2 bi
Avstånd f mellan projektionscentrum O och
bildhorisonten
Ur formel (5) erhålles
1
/’ = vv +
\/ao2 +bo2
eller efter insättning av (14)
/’=[2(AHB2)+(Aci+Bc2+C)(ao2+bo2)]
(A2 + B2)V/ao2 + boä
Flyghöjd h
Som framgår av fig. är
, ti
h — jr c
där c är kamerakonstanten.
Efter insättning av (13) och (15) erhålles
A2 + B2 i /A2 + B2
V:
ao2 + bo2
(16)
(16)
c (17)
h 2 (A2 + B2)+(Ac, + Bej + C)(ao2 + bos)
Lutningsvinkeln v
Fig. 1 ger direkt
c
sm r jT
Insättes uttrycket för f (15) erhålles
. v__(Aa + ß2)V _
Sin 2(A’ + B2) + (Ac1 + Bc2+C) .+ &.")’ 1 j
Formlerna (17) och (18) uttrycker de sökta storheterna,
flyghöjden h och lutningsvinkeln v som funktioner av
koefficienterna i (1) och kamerakonstanten.
Man kan också skriva uttrycken på följande sätt
1
och
där
[2 + P (Aq + Bca + C)] k
sin v = h k (ao2 + b0»)
b0 bi
(17 a)
(18 a)
4 _ "O "2
~~ b0 b2
B =
+ b02
+ B2
Efter von Gruber har så vitt jag vet endast P Tham
behandlat ifrågavarande problem, nämligen i sin
doktorsavhandling2 och en del andra arbeten3. Tham har utvecklat
en metod att bestämma flyghöjd och bildlutning. Då denna
metod emellertid förutsätter, att bildhuvudpunktens H’
koordinater x’ fj och g’ h mätes eller beräknas, kan den
inte anses teoretiskt slutgiltig.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}