
Full resolution (JPEG) - On this page / på denna sida - H. 21. 24 maj 1947 - Träets hållfasthet vid spänning snett emot fibrerna, av Sven Olof Asplund - Mekaniserad bilparkering
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
2 A maj 1947
455
parallell med fiberriktningen. Enligt Molirs konstruktion c
är ox = Oy eos2 y, oy = oy sin2;/ och rXy = oY eos y sin y.
Hållfastheten or i en godtycklig kraftriktning y bestämmes
helt enkelt av att ox uppnår draghållfastheten parallellt med
fibrerna eller av att ov uppnår draghållfastheten
vinkelrätt emot fibrerna eller av att rXy uppnår skjuvhållfastheten
längs fibrerna. I Kraemers försöksserie över
draghållfastheten hos björkfaner befinnes dessa hållfastheter vara
Ox — 1 127, Oy i= 21,5 och txy= 43,8 kp/cm3. I stället
fölen kurva får man alltså tre olika, fig. 2, som inom de
områden, där var och en är lägst, anger hållfastheten.
Överensstämmelsen med de Kraemerska försöksvärdena är
utmärkt. Detta talar inte endast för riktigheten av Stüssis
förklaring utan även för att Kraemers försök varit
omsorgsfullt genomförda. Stiissi påvisar liknande god
överensstämmelse vid tryckförsök (F Stüssi i Schweizer.
Bauztg 16 nov. 1946). Sven Olof Asplund
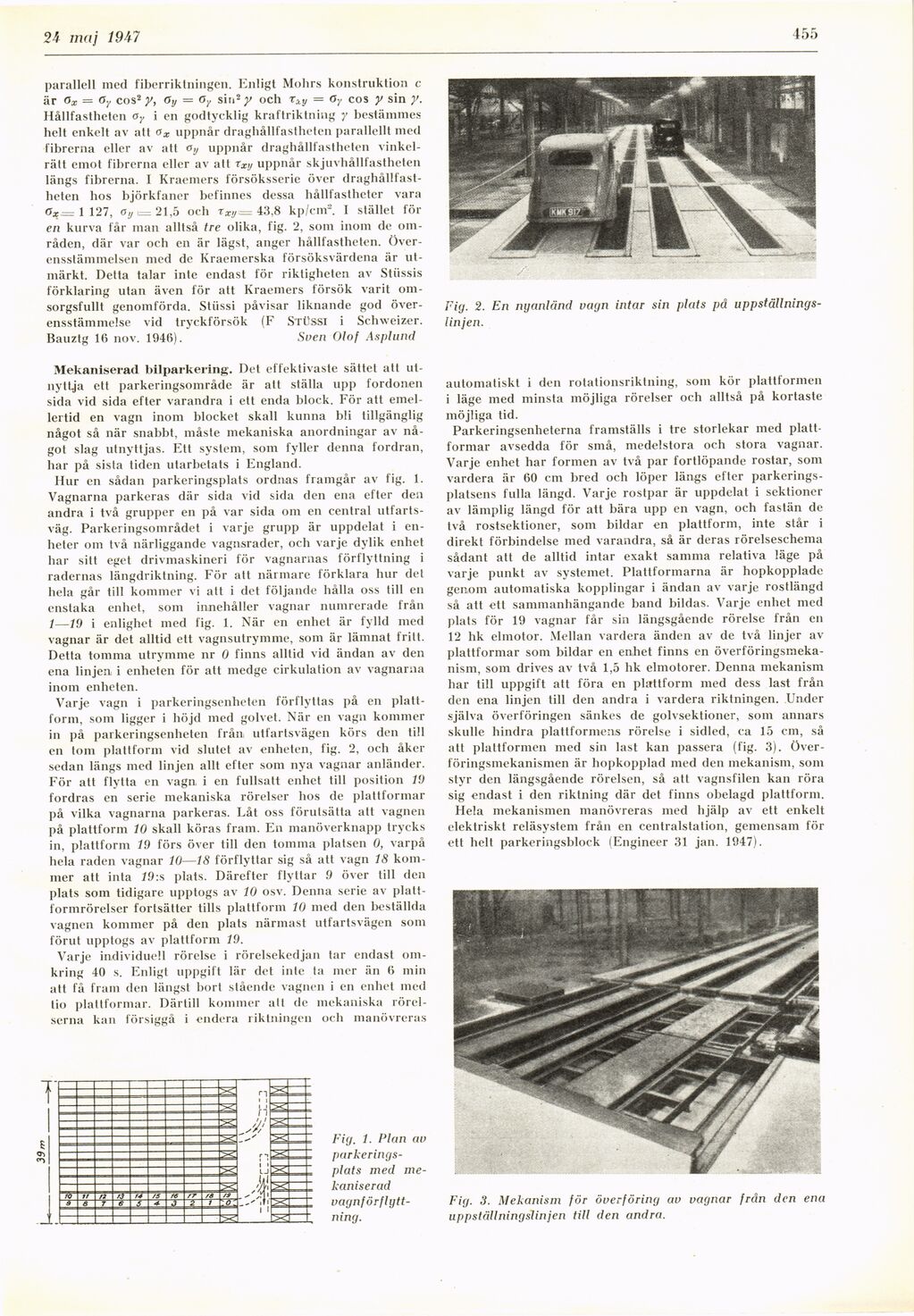
Fig. 2. En nyanländ vagn intar sin plats på
uppställnings-linjen.
automatiskt i den rotationsriktning, som kör plattformen
i läge med minsta möjliga rörelser och alltså på kortaste
möjliga tid.
Parkeringsenheterna framställs i tre storlekar med
plattformar avsedda för små, medelstora och stora vagnar.
Varje enhet har formen av två par fortlöpande rostar, som
vardera är 60 cm bred och löper längs efter
parkeringsplatsens fulla längd. Varje rostpar är uppdelat i sektioner
av lämplig längd för att bära upp en vagn, och fastän de
två rostsektioner, som bildar en plattform, inte står i
direkt förbindelse med varandra, så är deras rörelseschema
sådant att de alltid intar exakt samma relativa läge på
varje punkt av systemet. Plattformarna är hopkopplade
genom automatiska kopplingar i ändan av varje rostlängd
så att ett sammanhängande band bildas. Varje enhet med
plats för 19 vagnar får sin längsgående rörelse från en
12 hk elmotor. Mellan vardera änden av de två linjer
av-plattformar som bildar en enhet finns en
överföringsmekanism, som drives av två 1,5 hk elmotorer. Denna mekanism
har till uppgift att föra en plattform med dess last från
den ena linjen till den andra i vardera riktningen. Under
själva överföringen sänkes de golvsektioner, som annars
skulle hindra plattformens rörelse i sidled, ca 15 cm, så
att platlformen med sin last kan passera (fig. 3).
Överföringsmekanismen är hopkopplad med den mekanism, som
styr den längsgående rörelsen, så att vagnsfilen kan röra
sig endast i den riktning där det finns obelagd plattform.
Hela mekanismen manövreras med hjälp av ett enkelt
elektriskt reläsystem från en centralstation, gemensam för
ett helt parkeringsblock (Engineer 31 jan. 1947).
Fig. 3. Mekanism för överföring av vagnar från den ena
uppställningslinjen till den andra.
Mekaniserad bilparkering. Det effektivaste sättet att
utnyttja ett parkeringsområde är att ställa upp fordonen
sida vid sida efter varandra i ett enda block. För att
emellertid en vagn inom blocket skall kunna bli tillgänglig
något så när snabbt, måste mekaniska anordningar av
något slag utnyttjas. Ett system, som fyller denna fordran,
har på sista tiden utarbetats i England.
Hur en sådan parkeringsplats ordnas framgår av fig. 1.
Vagnarna parkeras där sida vid sida den ena efter den
andra i två grupper en på var sida om en central
utfarts-väg. Parkeringsområdet i varje grupp är uppdelat i
enheter om två närliggande vagnsrader, och varje dylik enhet
har sitt eget drivmaskineri för vagnarnas förflyttning i
radernas längdriktning. För att närmare förklara hur det
bela går till kommer vi att i det följande hålla oss till en
enstaka enhet, som innehåller vagnar numrerade från
1—10 i enlighet med fig. 1. När en enhet är fylld med
vagnar är det alltid ett vagnsutrymme, som är lämnat fritt.
Detta tomma utrymme nr 0 finns alltid vid ändan av den
ena linjen, i enheten för att medge cirkulation av vagnarna
inom enheten.
Varje vagn i parkeringsenheten förflyttas på en
plattform, som ligger i höjd med golvet. När en vagn kommer
in på parkeringsenheten från utfartsvägen körs den till
en tom plattform vid slutet av enheten, fig. 2, och åker
sedan längs med linjen allt efter som nya vagnar anländer.
För att flytta en vagn i en fullsatt enhet till position 10
fordras en serie mekaniska rörelser hos de plattformar
på vilka vagnarna parkeras. Låt oss förutsätta att vagnen
på plattform 10 skall köras fram. En manöverknapp trycks
in, plattform 10 förs över till den tomma platsen 0, varpå
hela raden vagnar 10—18 förflyttar sig så att vagn 18
kommer att inta 10:s plats. Därefter flyttar 0 över till den
plats som tidigare upptogs av 10 osv. Denna serie av
plattformrörelser fortsätter tills plattform 10 med den beställda
vagnen kommer på den plats närmast utfartsvägen som
förut upptogs av plattform 10.
Varje individuell rörelse i rörelsekedjan tar endast
omkring 40 s. Enligt uppgift lär det inte ta mer än 6 min
att få fram den längst bort stående vagnen i en enhet med
tio plattformar. Därtill kommer att de mekaniska
rörelserna kan försiggå i endera riktningen och manövreras
Fig. 1. Plan av [-parkeringsplats-]
{+parkerings-
plats+} med
mekaniserad vagnförflyttning.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}