
Full resolution (JPEG) - On this page / på denna sida - H. 25. 21 juni 1947 - Robotvapen och robotstyrningar, av Sven Malmström
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
14 juni 1947
531
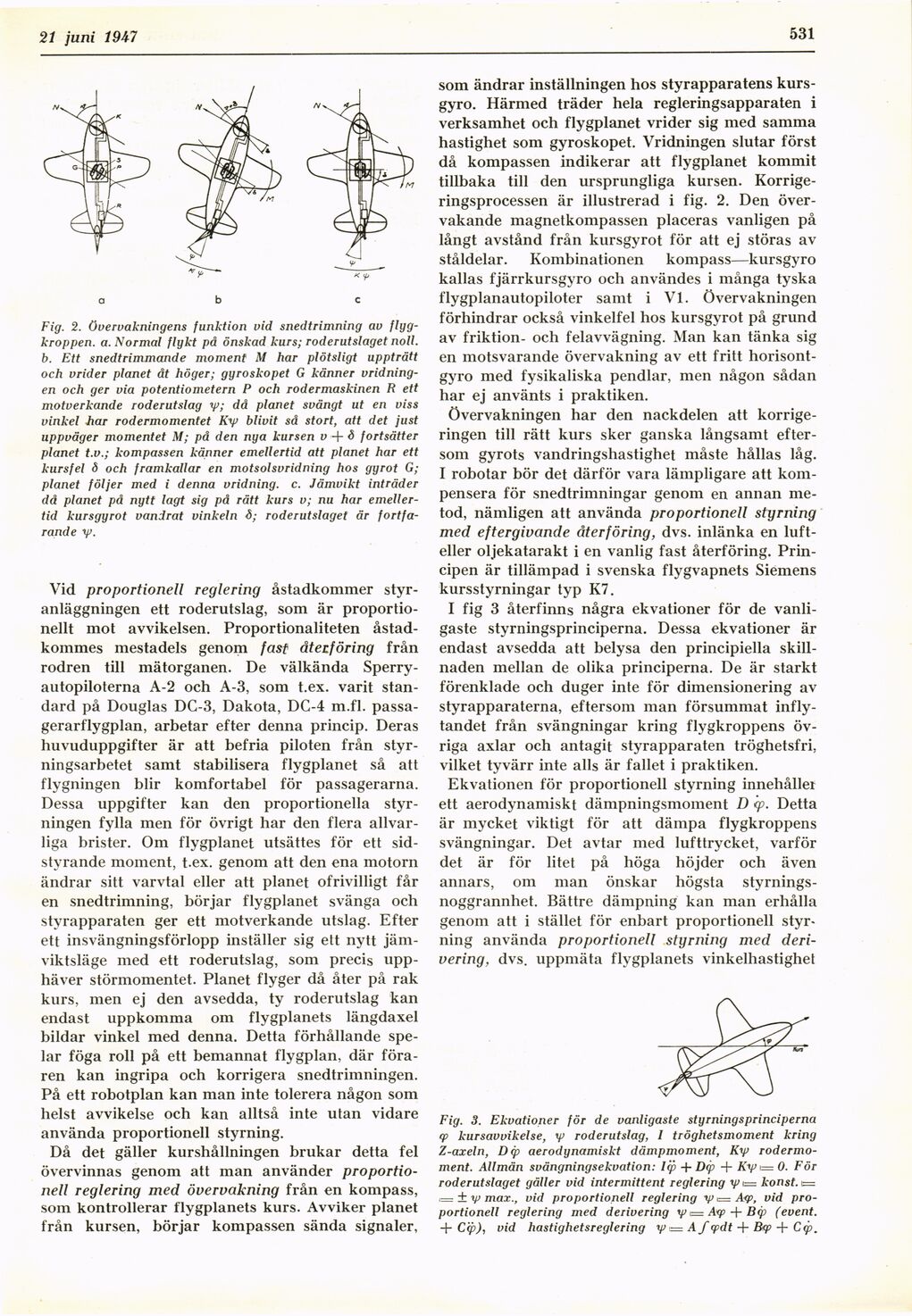
Fig. 2. övervakningens funktion vid snedtrimning av
flyg-kroppen. a. Normal flykt på önskad kurs; roderutslaget noll.
b. Ett snedtrimmande moment M har plötsligt uppträtt
och vrider planet åt höger; gyroskopet G känner
vridningen och ger via potentiometern P och rodermaskinen R ett
motverkande roderutslag y; då planet svängt ut en viss
vinkel har rodermomentet Ky blivit så stort, att det just
uppväger momentet M; på den nya kursen v -f ö fortsätter
planet t.v.; kompassen känner emellertid att planet har ett
kursfel 8 och framkallar en motsolsvridning hos gyrot G;
planet följer med i denna vridning, c. Jämvikt inträder
då planet på nytt lagt sig på rätt kurs v; nu har
emellertid kursgyrot vandrat vinkeln S; roderutslaget är
fortfarande y.
Vid proportionell reglering åstadkommer
styr-anläggningen ett roderutslag, som är
proportionellt mot avvikelsen. Proportionaliteten
åstadkommes mestadels genom fast återföring från
rodren till mätorganen. De välkända
Sperry-autopiloterna A-2 och A-3, som t.ex. varit
standard på Douglas DC-3, Dakota, DC-4 m.fl.
passa-gerarflygplan, arbetar efter denna princip. Deras
huvuduppgifter är att befria piloten från
styrningsarbetet samt stabilisera flygplanet så att
flygningen blir komfortabel för passagerarna.
Dessa uppgifter kan den proportionella
styrningen fylla men för övrigt har den flera
allvarliga brister. Om flygplanet utsättes för ett
sid-styrande moment, t.ex. genom att den ena motorn
ändrar sitt varvtal eller att planet ofrivilligt får
en snedtrimning, börjar flygplanet svänga och
styrapparaten ger ett motverkande utslag. Efter
ett insvängningsförlopp inställer sig ett nytt
jämviktsläge med ett roderutslag, som precis
upphäver störmomentet. Planet flyger då åter på rak
kurs, men ej den avsedda, ty roderutslag kan
endast uppkomma om flygplanets längdaxel
bildar vinkel med denna. Detta förhållande
spelar föga roll på ett bemannat flygplan, där
föraren kan ingripa och korrigera snedtrimningen.
På ett robotplan kan man inte tolerera någon som
helst avvikelse och kan alltså inte utan vidare
använda proportionell styrning.
Då det gäller kurshållningen brukar detta fel
övervinnas genom att man använder
proportionell reglering med övervakning från en kompass,
som kontrollerar flygplanets kurs. Avviker planet
från kursen, börjar kompassen sända signaler,
som ändrar inställningen hos styrapparatens
kurs-gyro. Härmed träder hela regleringsapparaten i
verksamhet och flygplanet vrider sig med samma
hastighet som gyroskopet. Vridningen slutar först
då kompassen indikerar att flygplanet kommit
tillbaka till den ursprungliga kursen.
Korrigeringsprocessen är illustrerad i fig. 2. Den
övervakande magnetkompassen placeras vanligen på
långt avstånd från kursgyrot för att ej störas av
ståldelar. Kombinationen kompass—kursgyro
kallas fjärrkursgyro och användes i många tyska
flygplanautopiloter samt i VI. Övervakningen
förhindrar också vinkelfel hos kursgyrot på grund
av friktion- och felavvägning. Man kan tänka sig
en motsvarande övervakning av ett fritt
horisont-gyro med fysikaliska pendlar, men någon sådan
har ej använts i praktiken.
Övervakningen har den nackdelen att
korrigeringen till rätt kurs sker ganska långsamt
eftersom gyrots vandringshastighet måste hållas låg.
I robotar bör det därför vara lämpligare att
kompensera för snedtrimningar genom en annan
metod, nämligen att använda proportionell styrning
med eftergivande återföring, dvs. inlänka en
luft-eller oljekatarakt i en vanlig fast återföring.
Principen är tillämpad i svenska flygvapnets Siemens
kursstyrningar typ K7.
I fig 3 återfinns några ekvationer för de
vanligaste styrningsprinciperna. Dessa ekvationer är
endast avsedda att belysa den principiella
skillnaden mellan de olika principerna. De är starkt
förenklade och duger inte för dimensionering av
styrapparaterna, eftersom man försummat
inflytandet från svängningar kring flygkroppens
övriga axlar och antagit styrapparaten tröghetsfri,
vilket tyvärr inte alls är fallet i praktiken.
Ekvationen för proportionell styrning innehåller
ett aerodynamiskt dämpningsmoment D <p. Detta
är mycket viktigt för att dämpa flygkroppens
svängningar. Det avtar med lufttrycket, varför
det är för litet på höga höjder och även
annars, om man önskar högsta
styrnings-noggrannhet. Bättre dämpning kan man erhålla
genom att i stället för enbart proportionell
styrning använda proportionell styrning med
deri-vering, dvs. uppmäta flygplanets vinkelhastighet
Fig. 3. Ekvationer för de vanligaste styrningsprinciperna
cp kursavvikelse, y roderutslag, I tröghetsmoment kring
Z-axeln, D(p aerodynamiskt dämpmoment, Ky
rodermo-ment. Allmän svängningsekvation: I(p + Dep + För
roderutslaget gäller vid intermittent reglering xp\= konst. i=
i= ± yj max., vid proportionell reglering v= A<p, vid
proportionell reglering med derivering rp,— A<p + B(p (event.
+ Cijy), vid hastighetsreglering = Af (pdt + B<pC<p.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}