
Full resolution (JPEG) - On this page / på denna sida - H. 25. 21 juni 1947 - Robotvapen och robotstyrningar, av Sven Malmström
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
14 juni 1947
535
Hs 293 D. Bombfällaren iakttog siktbilden på sin
televisionsmottagare och kunde ge korrektionsimpulser även
om moderplanet ej flög rakt, så länge det blott höll sig
inom sändarens räckvidd, 27 km. Fig. 10 visar en
televisionsbild från en glidbombanläggning. Gb 4-bomber fästes
två och två under vingarna på Flygande Fästningar.
Glidsträckan var 32 km.
ROC var en vidareutveckling av Gb 4 som kunde
användas med televisionssökning, optisk styrning från
moder-plan eller självstyrning med radar.
Jaktrobotar
Hs 298, fig. 11, hade följande data: längd 1,2 m, vikt 100
kg, sprängladdning 25 kg, raketmotor, räckvidd 4 km,
stabilisering: endast på skevrodret, proportionalreglering
från horisontgvro; styrning: optisk sökning, fjärrstyrning
via tråd eller radio; impulserna påverkar höjdrodret och
skevrodret.
Bomben var ursprungligen avsedd för
fartygsbekämpning men gjordes om till jaktrobot och tillverkades i
början av 1945 i Berlins underjordisk järnväg. Endast 300
exemplar tillverkades, varefter man övergick till den
effektivare "Ruhrstahl". Bomben fästes under ett jaktplan och
avfyrades på 1—3 km avstånd. Den fjärrstyrdes mot målet
och i närheten av detta utlöstes sprängladdningen av en
"proxiinity fuse". En svaghet var att moderplanet måste
koncentrera sig på fjärrstyrningen så att det hindrades i
sitt eget försvar.
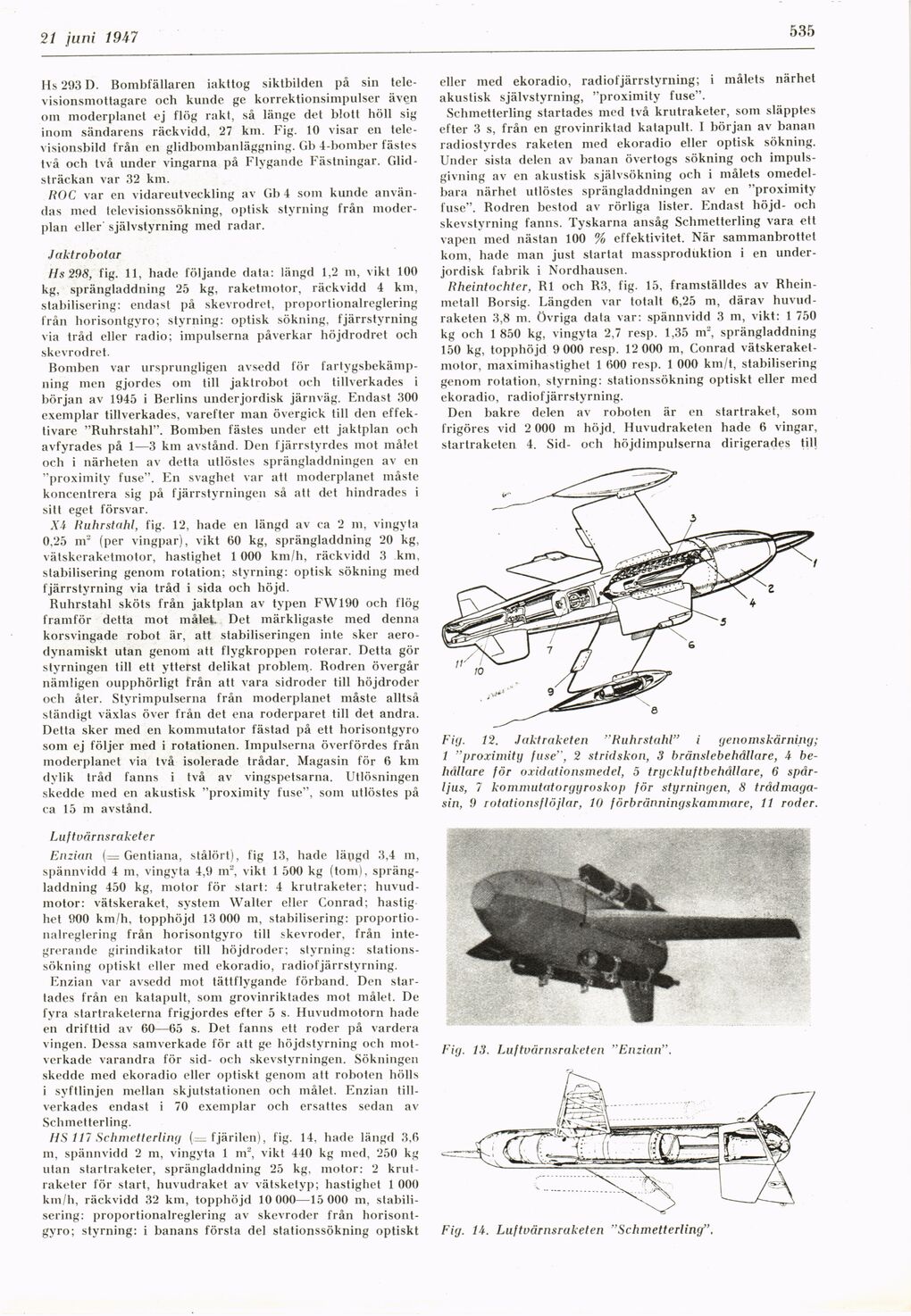
X4 Ruhrstahl, fig. 12, hade en längd av ca 2 m, vingyta
0.25 nr (per vingpar), vikt 60 kg, sprängladdning 20 kg,
vätskeraketmotor, hastighet 1 000 km/h, räckvidd 3 km,
stabilisering genom rotation; styrning: optisk sökning med
fjärrstyrning via tråd i sida och höjd.
Ruhrstahl sköts från jaktplan av typen FVV190 och flög
framför detta mot målet. Det märkligaste med denna
korsvingade robot är, att stabiliseringen inte sker
aerodynamiskt utan genom att flygkroppen roterar. Detta gör
styrningen till ett ytterst delikat problem.. Rodren övergår
nämligen oupphörligt från att vara sidroder till höjdroder
och åter. Styrimpulserna från moderplanet måste alltså
ständigt växlas över från det ena roderparet till det andra.
Detta sker med en kommutator fästad på ett horisontgyro
som ej följer med i rotationen. Impulserna överfördes från
moderplanet via två isolerade trådar. Magasin för 6 km
dylik tråd fanns i två av vingspetsarna. Utlösningen
skedde med en akustisk "proximity fuse", som utlöstes på
ca 15 m avstånd.
Luftvärnsraketer
Enzian (= Gentiana, stålört), fig 13, hade läpgd 3,4 m,
spännvidd 4 m, vingyta 4,9 nr, vikt 1 500 kg (tom),
sprängladdning 450 kg, motor för start: 4 krutraketer;
huvudmotor: vätskeraket, system Walter eller Conrad; hastig
het 900 km/h, topphöjd 1.3 000 m, stabilisering:
proportionalreglering från horisontgyro till skevroder, från
integrerande girindikator till höjdroder; styrning:
stationssökning optiskt eller med ekoradio, radiofjärrstyrning.
Enzian var avsedd mot tättflygande förband. Den
startades från en katapult, som grovinriktades mot målet. De
fyra startraketerna frigjordes efter 5 s. Huvudmotorn hade
en drifttid av 60—65 s. Det fanns ett roder på vardera
vingen. Dessa samverkade för alt ge höjdstyrning och
motverkade varandra för sid- och skevstyrningen. Sökningen
skedde med ekoradio eller optiskt genom att roboten hölls
i syftlinjen mellan skjutstationen och målet. Enzian
tillverkades endast i 70 exemplar och ersattes sedan av
Schmetterling.
HS 117 Schmetterling (= fjärilen), fig. 14, hade längd 3,6
m, spännvidd 2 m, vingyta 1 nr, vikt 440 kg med, 250 kg
utan startraketer, sprängladdning 25 kg, motor: 2
krut-raketer för start, huvudraket av vätsketyp; hastighet 1 000
km/h, räckvidd 32 km, topphöjd 10 000—15 000 m,
stabilisering: proportionalreglering av skevroder från
horisontgyro; styrning: i banans första del stationssökning optiskt
eller med ekoradio, radiofjärrstyrning; i målets närhet
akustisk självstyrning, "proximity fuse".
Schmetterling startades med två krutraketer, som släpptes
efter 3 s, från en grovinriktad katapult. I början av banan
radiostyrdes raketen med ekoradio eller optisk sökning.
Under sista delen av banan övertogs sökning och
impuls-givning av en akustisk självsökning och i målets
omedelbara närhet utlöstes sprängladdningen av en "proximity
fuse". Rodren bestod av rörliga lister. Endast höjd- och
skevstyrning fanns. Tyskarna ansåg Schmetterling vara ett
vapen med nästan 100 % effektivitet. När sammanbrottet
kom, hade man just startat massproduktion i en
underjordisk fabrik i Nordhausen.
Rheintochter, Rl och R3, fig. 15, framställdes av
Rhein-metall Borsig. Längden var totalt 6,25 m, därav
huvudraketen 3,8 m. Övriga data var: spännvidd 3 m, vikt: 1 750
kg och 1 850 kg, vingyta 2,7 resp. 1,35 nr, sprängladdning
150 kg, topphöjd 9 000 resp. 12 000 m, Conrad
vätskeraketmotor, maximihastighet 1 600 resp. 1 000 km/t, stabilisering
genom rotation, styrning: stationssökning optiskt eller med
ekoradio, radiofjärrstyrning.
Den bakre delen av roboten är en startraket, som
frigöres vid 2 (>00 m höjd. Huvudraketen hade 6 vingar,
startraketen 4. Sid- och höjdimpulserna dirigerades till
Fig. 12. Jaktraketen "Ruhrstahl" i genomskärning;
1 "proximity fuse", 2 stridskon, 3 bränslebehållare, 4
behållare för oxidationsmedel, 5 tryckluftbehållare, 6
spårljus, 7 kommutatorgyroskop för styrningen, 8
trådmagasin, 9 rotationsflöjlar, 10 förbränningskammare, 11 roder.
Fig. 13. Luftvärnsraketen ’’Enzian".
Fig. 14. Luftvärnsraketen "Schmetterling".
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}