
Full resolution (JPEG) - On this page / på denna sida - H. 11. 13 mars 1948 - Servostyrningar, av Laszlo von Hámos
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
12(5
TEKNISK TIDSKRIFT
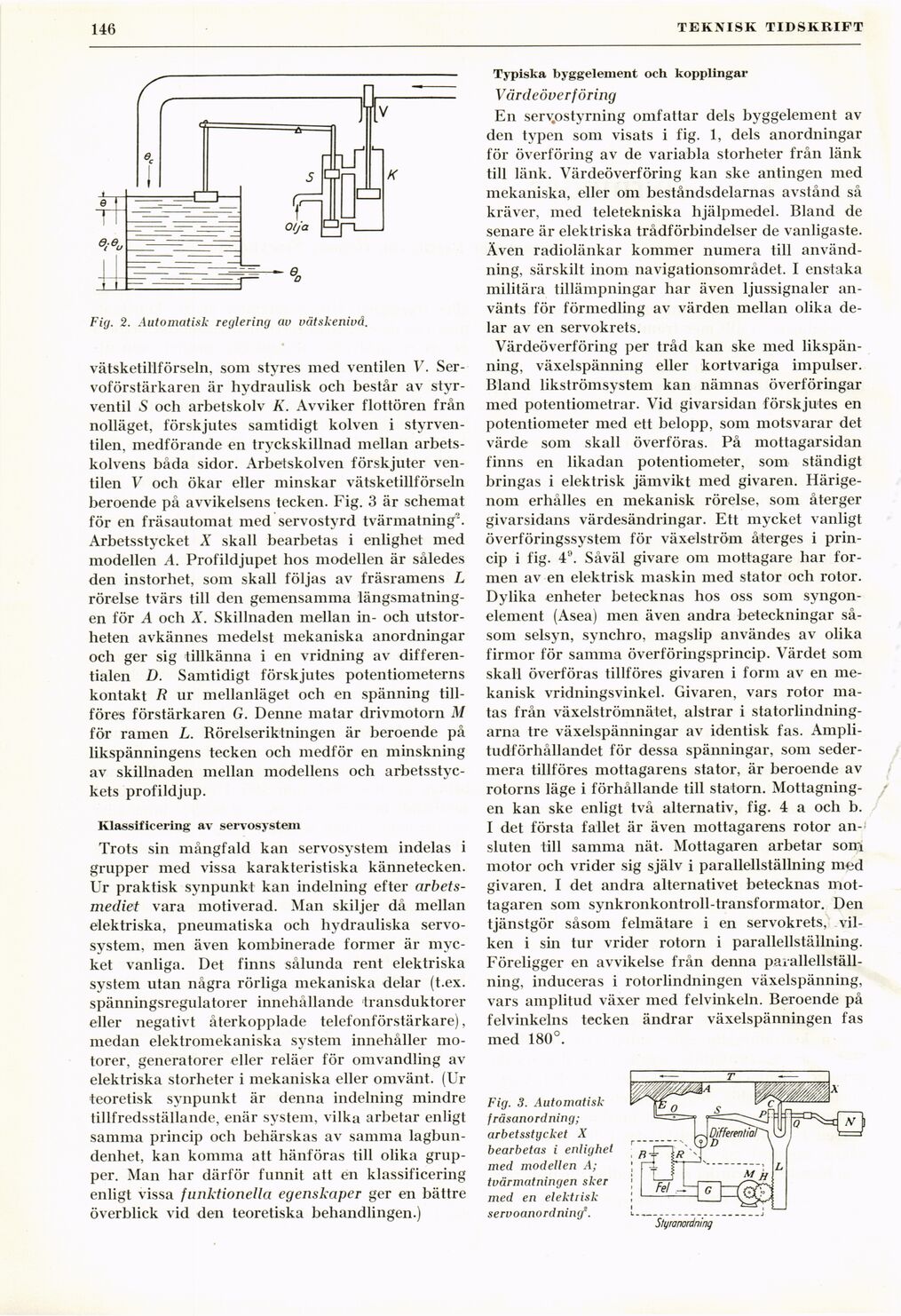
Fig. 2. Automatisk reglering au vätskenivå.
vätsketillförseln, som styres med ventilen V.
Ser-voförstärkaren är hydraulisk och består av
styr-ventil S och arbetskolv K. Avviker flottören från
nolläget, förskjutes samtidigt kolven i
styrventilen, medförande en tryckskillnad mellan
arbets-kolvens båda sidor. Arbetskolven förskjuter
ventilen V och ökar eller minskar vätsketillförseln
beroende på avvikelsens tecken. Fig. 3 är schemat
för en fräsautomat med servostyrd tvär matning12.
Arbetsstycket X skall bearbetas i enlighet med
modellen A. Profildjupet hos modellen är således
den instorhet, som skall följas av fräsramens L
rörelse tvärs till den gemensamma
längsmatning-en för A och A’. Skillnaden mellan in- och
utstor-heten avkännes medelst mekaniska anordningar
och ger sig tillkänna i en vridning av
differentialen D. Samtidigt förskjutes potentiometerns
kontakt R ur mellanläget och en spänning
tillföres förstärkaren G. Denne matar drivmotorn M
för ramen L. Rörelseriktningen är beroende på
likspänningens tecken och medför en minskning
av skillnaden mellan modellens och
arbetsstyckets profildjup.
Klassificering av servosystem
Trots sin mångfald kan servosystem indelas i
grupper med vissa karakteristiska kännetecken.
Ur praktisk synpunkt kan indelning efter
cirbets-mediet vara motiverad. Man skiljer då mellan
elektriska, pneumatiska och hydrauliska
servosystem, men även kombinerade former är
mycket vanliga. Det finns sålunda rent elektriska
system utan några rörliga mekaniska delar (t.ex.
spänningsregulatorer innehållande transduktorer
eller negativt återkopplade telefonförstärkare),
medan elektromekaniska system innehåller
motorer, generatorer eller reläer för omvandling av
elektriska storheter i mekaniska eller omvänt. (Ur
teoretisk synpunkt är denna indelning mindre
tillfredsställande, enär system, vilka arbetar enligt
samma princip och behärskas av samma
lagbundenhet, kan komma att hänföras till olika
grupper. Man har därför funnit att en klassificering
enligt vissa funktionella egenskaper ger en bättre
överblick vid den teoretiska behandlingen.)
Typiska byggelement och kopplingar
Värdeöverföring
En serv.ostyrning omfattar dels byggelement av
den typen som visats i fig. 1, dels anordningar
för överföring av de variabla storheter från länk
till länk. Värdeöverföring kan ske antingen med
mekaniska, eller om beståndsdelarnas avstånd så
kräver, med teletekniska hjälpmedel. Bland de
senare är elektriska trådförbindelser de vanligaste.
Även radiolänkar kommer numera till
användning, särskilt inom navigationsområdet. I enstaka
militära tillämpningar har även ljussignaler
använts för förmedling av värden mellan olika
delar av en servokrets.
Värdeöverföring per tråd kan ske med
likspänning, växelspänning eller kortvariga impulser.
Bland likströmsystem kan nämnas överföringar
med potentiometrar. Vid givarsidan förskjutes en
potentiometer med ett belopp, som motsvarar det
värde som skall överföras. På mottagarsidan
finns en likadan potentiometer, som ständigt
bringas i elektrisk jämvikt med givaren.
Härigenom erhålles en mekanisk rörelse, som återger
givarsidans värdesändringar. Ett mycket vanligt
överföringssystem för växelström återges i
princip i fig. 4°. Såväl givare om mottagare har
formen av en elektrisk maskin med stator och rotor.
Dylika enheter betecknas hos oss som
syngon-element (Asea) men även andra beteckningar
såsom selsyn, synchro, magslip användes av olika
firmor för samma överföringsprincip. Värdet som
skall överföras tillföres givaren i form av en
mekanisk vridningsvinkel. Givaren, vars rotor
matas från växelströmnätet, alstrar i
statorlindning-arna tre växelspänningar av identisk fas.
Ampli-tudförhållandet för dessa spänningar, som
sedermera tillföres mottagarens stator, är beroende av
rotorns läge i förhållande till statorn.
Mottagningen kan ske enligt två alternativ, fig. 4 a och b.
I det första fallet är även mottagarens rotor an-f
sluten till samma nät. Mottagaren arbetar som
motor och vrider sig själv i parallellställning med
givaren. I det andra alternativet betecknas
mottagaren som synkronkontroll-transformator. Den
tjänstgör såsom felmätare i en servokrets,
vilken i sin tur vrider rotorn i parallellställning.
Föreligger en avvikelse från denna
parallellställning, induceras i rotorlindningen växelspänning,
vars amplitud växer med felvinkeln. Beroende på
fel vinkelns tecken ändrar växelspänningen fas
med 180°.
Fig. 3. Automatisk
fräsanorclning;
arbetsstycket X
bearbetas i enlighet
med modellen A;
tvärmatningen sker
med en elektrisk
servoanordning1.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}