
Full resolution (JPEG) - On this page / på denna sida - H. 12. 20 mars 1948 - Teori för servostyrningar, av Laszlo von Hámos
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
13 mars 1948
169
Fig. 9. Olika möjligheter
för placering av en
stabiliserande länk i
servo-kedjan.
felets derivata (ev. flera derivator) eller dess
integral eller båda, med hänsyn till tidsvariabeln
ingå i styrstorheten. I allmänhet uttryckes
sambandet mellan Q och ßc genom en
överföringsoperator, som här skall betecknas med Yc [p) ■
Några idealiserade fall har följande
karakteristiska operatorer:
proportionell styrning: y^konst.
+ l:a derivata-styrning: Y1=k1-\-k2’ p
+integralstyrning: Y1=ki-\~k^ 1 lp
+ derivata- +
integralstyrning: Y1=k1-\~k2 p-\~ks 1 lp
Det framgår av det tidigare sagda, att dessa
grupper vilka oftast figurerar i den äldre litteraturen
och inom tillämpningsområden, där man ännu
icke har tillämpat servoteknikens mera
avancerade konstruktioner, icke täcker mer än en
bråkdel av de tänkbara styrprinciperna. Vårt
numeriska exempel kan således icke inordnas i
någondera av ovanstående grupper.
Det bör påpekas, att integralstyrningens fördel
ligger i det minskade felet i
fortfarighetstillstån-det. Man inser lätt, att ett ev. fel, som under längre
tid skulle kvarstå, genom sin tidsintegral bidrar
till att eliminera sig självt.
Teori för icke-linjära servokretsar1-
För icke-linjära servokretsar föreligger ännu icke
någon enhetlig teori av det slag, som ovan har
skisserats. Vissa ansatser härtill finns dock och
börjar nu publiceras. Svårigheterna beror i
huvudsak på, att länkarnas överföringsegenskaper
icke endast är beroende av frekvensen, utan även
av amplituden. Vid diskontinuerliga system
tillkommer den olägenheten, att rörelseekvationens
parametrar stegvis ändra sig. Förutom vissa
analytiska approximativa metoder behandlas ofta
icke-linjära system med grafiska (topologiska)
metoder och undersökes experimentellt.
Fig. 7 belyser de avvikelser, vilka kan uppstå
från det linjära insvängningsförloppet till följd
av icke-linjäriteter i någon länk. Kurvorna 2 och
3 i denna figur har erhållits genom modellförsök14.
Kurva 2 gäller för det mycket vanliga fallet, att
servomotorn icke kan leverera det maximalt
erforderliga vridmomentet. Insvängningsförloppets
amplitud blir i detta fall mindre. Kurva 3 gäller
för mekaniskt glapp i återföringen (23 % av
språngfunktionens ordinata). Pendlingarna blir
mera utpräglade.
De vanligaste diskontinuerliga elektriska servo-
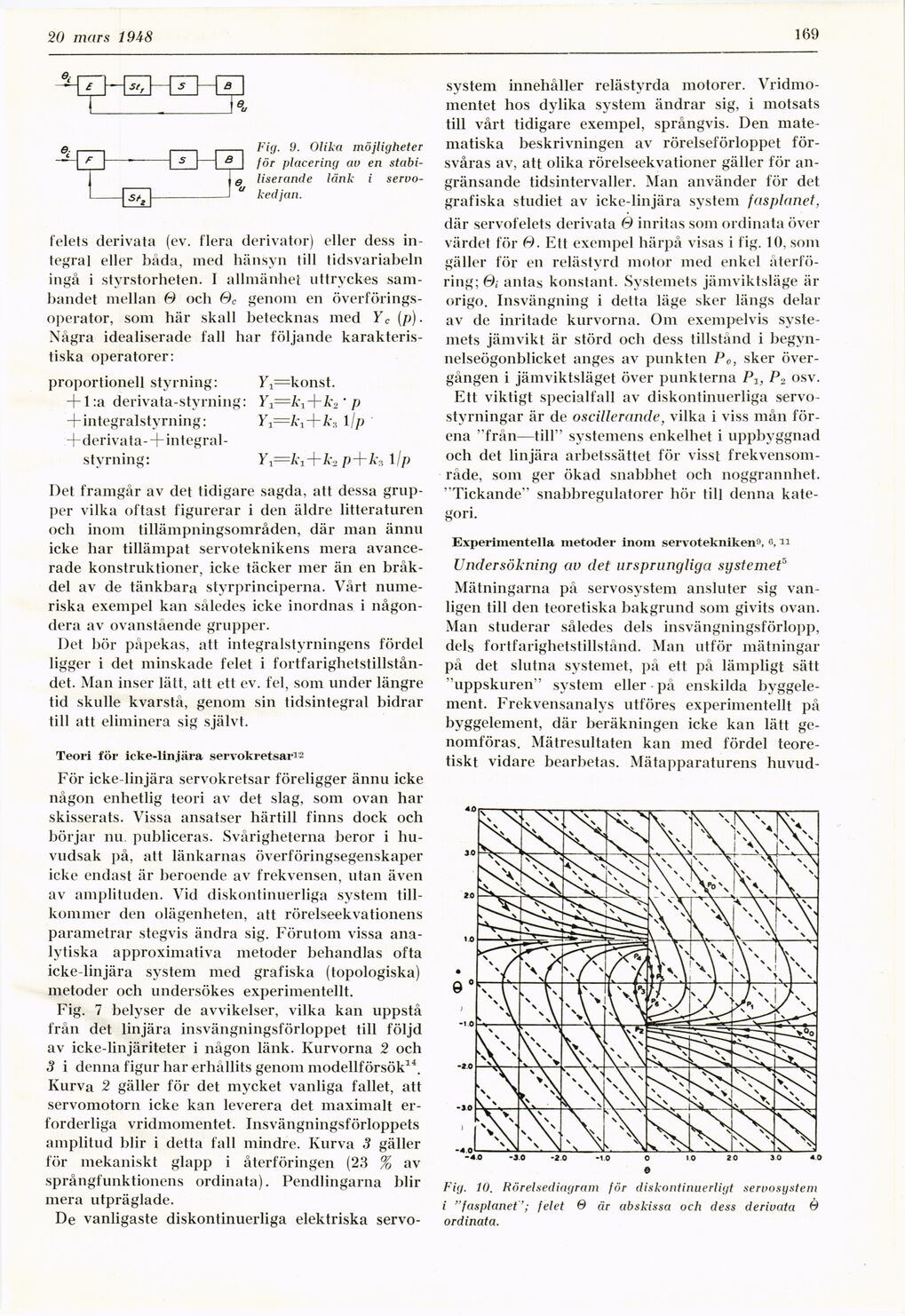
system innehåller relästyrda motorer.
Vridmomentet hos dylika system ändrar sig, i motsats
till vårt tidigare exempel, språngvis. Den
matematiska beskrivningen av rörelseförloppet
försvåras av, att olika rörelseekvationer gäller för
angränsande tidsintervaller. Man använder för det
grafiska studiet av icke-linjära system fasplanet,
där servofelets derivata S inritas som ordinata över
värdet för f). Ett exempel härpå visas i fig. 10, som
gäller för en relästyrd motor med enkel
återfö-ring; Øt antas konstant. Systemets jämviktsläge är
origo. Insvängning i detta läge sker längs delar
av de inritade kurvorna. Om exempelvis
systemets jämvikt är störd och dess tillstånd i
begynnelseögonblicket anges av punkten P0, sker
övergången i jämviktsläget över punkterna P1} Pz osv.
Ett viktigt specialfall av diskontinuerliga
servo-styrningar är de oscillerande, vilka i viss mån
förena "från—till" systemens enkelhet i uppbyggnad
och det linjära arbetssättet för visst
frekvensområde, som ger ökad snabbhet och noggrannhet.
"Tickande" snabbregulatorer hör till denna
kategori.
Experimentella metoder inom servotekniken9, n
Undersökning av det ursprungliga systemet5
Mätningarna på servosystem ansluter sig
vanligen till den teoretiska bakgrund som givits ovan.
Man studerar således dels insvängningsförlopp,
dels fortfarighetstillstånd. Man utför mätningar
på det slutna systemet, på ett på lämpligt sätt
"uppskuren" system eller på enskilda
byggelement. Frekvensanalys utföres experimentellt på
byggelement, där beräkningen icke kan lätt
genomföras. Mätresultaten kan med fördel
teoretiskt vidare bearbetas. Mätapparaturens huvud-
Fig. 10. Rörelsediagram för diskontinuerligt servosystem
i "fasplanet’; felet & är abskissa och dess derivata &
ordinata.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}