
Full resolution (JPEG) - On this page / på denna sida - H. 25. 19 juni 1948 - Nya autopiloter för flygplan, av Sven Malmström
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
406
TEKNISK TIDSKRIFT
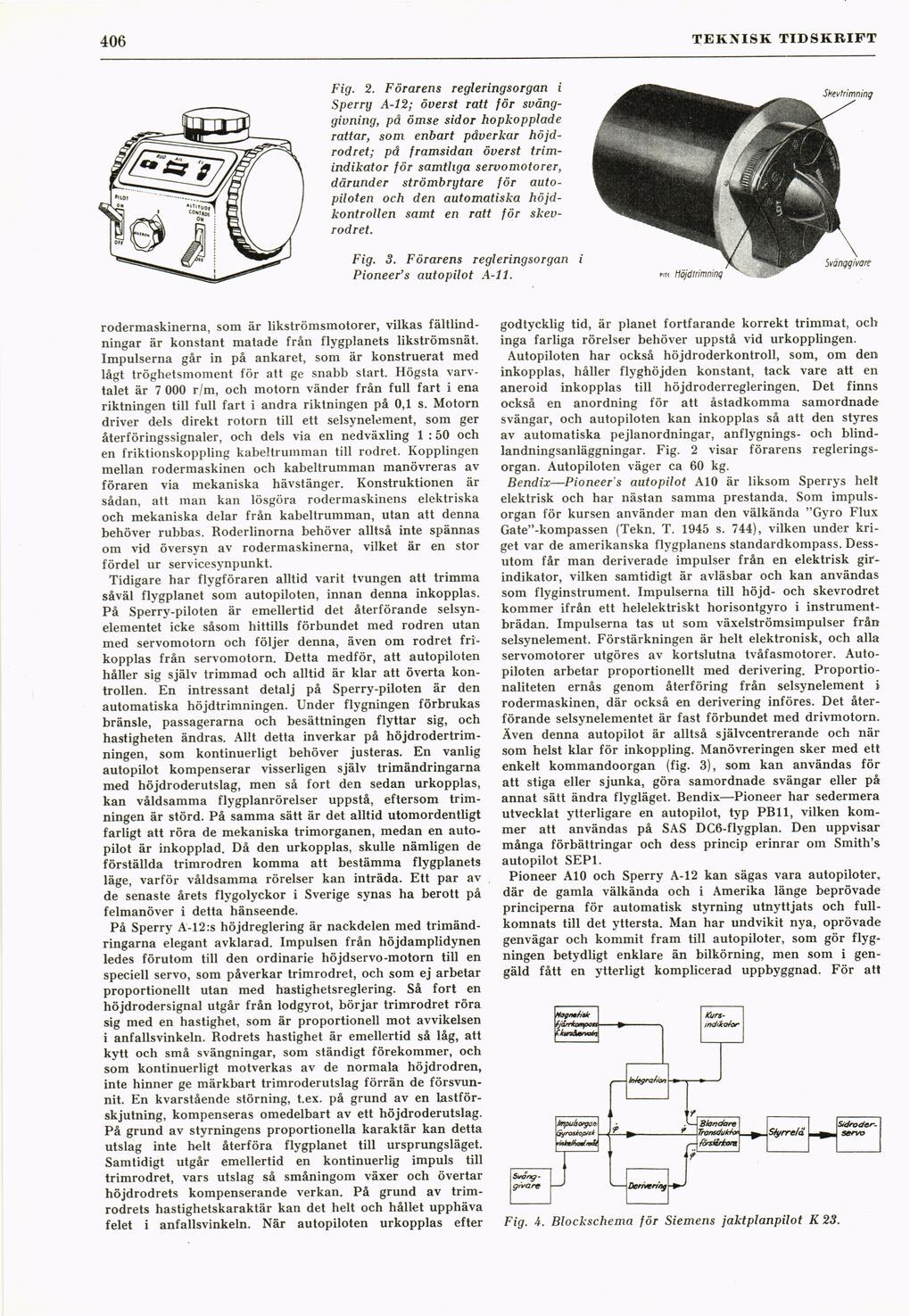
Fig. 2. Förarens regleringsorgan i
Sperry A-12; överst ratt för
svång-givning, på ömse sidor hopkopplade
rattar, som enbart påverkar
höjd-rodret; på framsidan överst
trim-indikator för samtliga servomotorer,
därunder strömbrytare för
auto-piloten och den automatiska
höjd-kontrollen samt en ratt för
skevrodret.
Fig. 3. Förarens regleringsorgan i
Pioneefs autopilot A-ll.
rodermaskinerna, som är likströmsmotorer, vilkas
fältlind-ningar är konstant matade från flygplanets likströmsnät.
Impulserna går in på ankaret, som är konstruerat med
lågt tröghetsmoment för att ge snabb start. Högsta
varvtalet är 7 000 r/m, och motorn vänder från full fart i ena
riktningen till full fart i andra riktningen på 0,1 s. Motorn
driver dels direkt rotorn till ett selsynelement, som ger
återföringssignaler, och dels via en nedväxling 1 :50 och
en friktionskoppling kabeltrumman till rodret. Kopplingen
mellan rodermaskinen och kabeltrumman manövreras av
föraren via mekaniska hävstänger. Konstruktionen är
sådan, att man kan lösgöra rodermaskinens elektriska
och mekaniska delar från kabeltrumman, utan att denna
behöver rubbas. Roderlinorna behöver alltså inte spännas
om vid översyn av rodermaskinerna, vilket är en stor
fördel ur servicesynpunkt.
Tidigare har flygföraren alltid varit tvungen att trimma
såväl flygplanet som autopiloten, innan denna inkopplas.
På Sperry-piloten är emellertid det återförande
selsyn-elementet icke såsom hittills förbundet med rodren utan
med servomotorn och följer denna, även om rodret
frikopplas från servomotorn. Detta medför, att autopiloten
håller sig själv trimmad och alltid är klar att överta
kontrollen. En intressant detalj på Sperry-piloten är den
automatiska höjdtrimningen. Under flygningen förbrukas
bränsle, passagerarna och besättningen flyttar sig, och
hastigheten ändras. Allt detta inverkar på
höjdrodertrim-ningen, som kontinuerligt behöver justeras. En vanlig
autopilot kompenserar visserligen själv trimändringarna
med höjdroderutslag, men så fort den sedan urkopplas,
kan våldsamma flygplanrörelser uppstå, eftersom
trimningen är störd. På samma sätt är det alltid utomordentligt
farligt att röra de mekaniska trimorganen, medan en
autopilot är inkopplad. Då den urkopplas, skulle nämligen de
förställda trimrodren komma att bestämma flygplanets
läge, varför våldsamma rörelser kan inträda. Ett par av
de senaste årets flygolyckor i Sverige synas ha berott på
felmanöver i detta hänseende.
På Sperry A-12:s höjdreglering är nackdelen med
trimändringarna elegant avklarad. Impulsen från höjdamplidynen
ledes förutom till den ordinarie höjdservo-motorn till en
speciell servo, som påverkar trimrodret, och som ej arbetar
proportionellt utan med hastighetsreglering. Så fort en
höjdrodersignal utgår från lodgyrot, börjar trimrodret röra
sig med en hastighet, som är proportionell mot avvikelsen
i anfallsvinkeln. Rodrets hastighet är emellertid så låg, att
kytt och små svängningar, som ständigt förekommer, och
som kontinuerligt motverkas av de normala höjdrodren,
inte hinner ge märkbart trimroderutslag förrän de
försvunnit. En kvarstående störning, t.ex. på grund av en
lastförskjutning, kompenseras omedelbart av ett höjdroderutslag.
På grund av styrningens proportionella karaktär kan detta
utslag inte helt återföra flygplanet till ursprungsläget.
Samtidigt utgår emellertid en kontinuerlig impuls till
trimrodret, vars utslag så småningom växer och övertar
höjdrodrets kompenserande verkan. På grund av
trimrodrets hastighetskaraktär kan det helt och hållet upphäva
felet i anfallsvinkeln. När autopiloten urkopplas efter
godtycklig tid, är planet fortfarande korrekt trimmat, och
inga farliga rörelser behöver uppstå vid urkopplingen.
Autopiloten har också höjdroderkontroll, som, om den
inkopplas, håller flyghöjden konstant, tack vare att en
aneroid inkopplas till höjdroderregleringen. Det finns
också en anordning för att åstadkomma samordnade
svängar, och autopiloten kan inkopplas så att den styres
av automatiska pejlanordningar, anflygnings- och
blind-landningsanläggningar. Fig. 2 visar förarens
regleringsorgan. Autopiloten väger ca 60 kg.
Bendix—Pioneer s autopilot A10 är liksom Sperrys helt
elektrisk och har nästan samma prestanda. Som
impulsorgan för kursen använder man den välkända "Gyro Flux
Gate"-kompassen (Tekn. T. 1945 s. 744), vilken under
kriget var de amerikanska flygplanens standardkompass.
Dessutom får man deriverade impulser från en elektrisk
girindikator, vilken samtidigt är avläsbar och kan användas
som flyginstrument. Impulserna till höjd- och skevrodret
kommer ifrån ett helelektriskt horisontgyro i
instrumentbrädan. Impulserna tas ut som växelströmsimpulser från
selsynelement. Förstärkningen är helt elektronisk, och alla
servomotorer utgöres av kortslutna tvåfasmotorer.
Autopiloten arbetar proportionellt med derivering.
Proportio-naliteten ernås genom återföring från selsynelement i
rodermaskinen, där också en derivering införes. Det
återförande selsynelementet är fast förbundet med drivmotorn.
Även denna autopilot är alltså självcentrerande och när
som helst klar för inkoppling. Manövreringen sker med ett
enkelt kommandoorgan (fig. 3), som kan användas för
att stiga eller sjunka, göra samordnade svängar eller på
annat sätt ändra flygläget. Bendix—Pioneer har sedermera
utvecklat ytterligare en autopilot, typ PB11, vilken
kommer att användas på SAS DC6-flygplan. Den uppvisar
många förbättringar och dess princip erinrar om Smith’s
autopilot SEP1.
Pioneer A10 och Sperry A-12 kan sägas vara autopiloter,
där de gamla välkända och i Amerika länge beprövade
principerna för automatisk styrning utnyttjats och
fullkomnats till det yttersta. Man har undvikit nya, oprövade
genvägar och kommit fram till autopiloter, som gör
flygningen betydligt enklare än bilkörning, men som i
gengäld fått en ytterligt komplicerad uppbyggnad. För att
Fig. 4. Blockschema för Siemens jaktplanpilot K 23.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}