
Full resolution (JPEG) - On this page / på denna sida - H. 14. 7 april 1951 - Modern turbinreglering, av Gunnar Enskog
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
1U april 1951
273
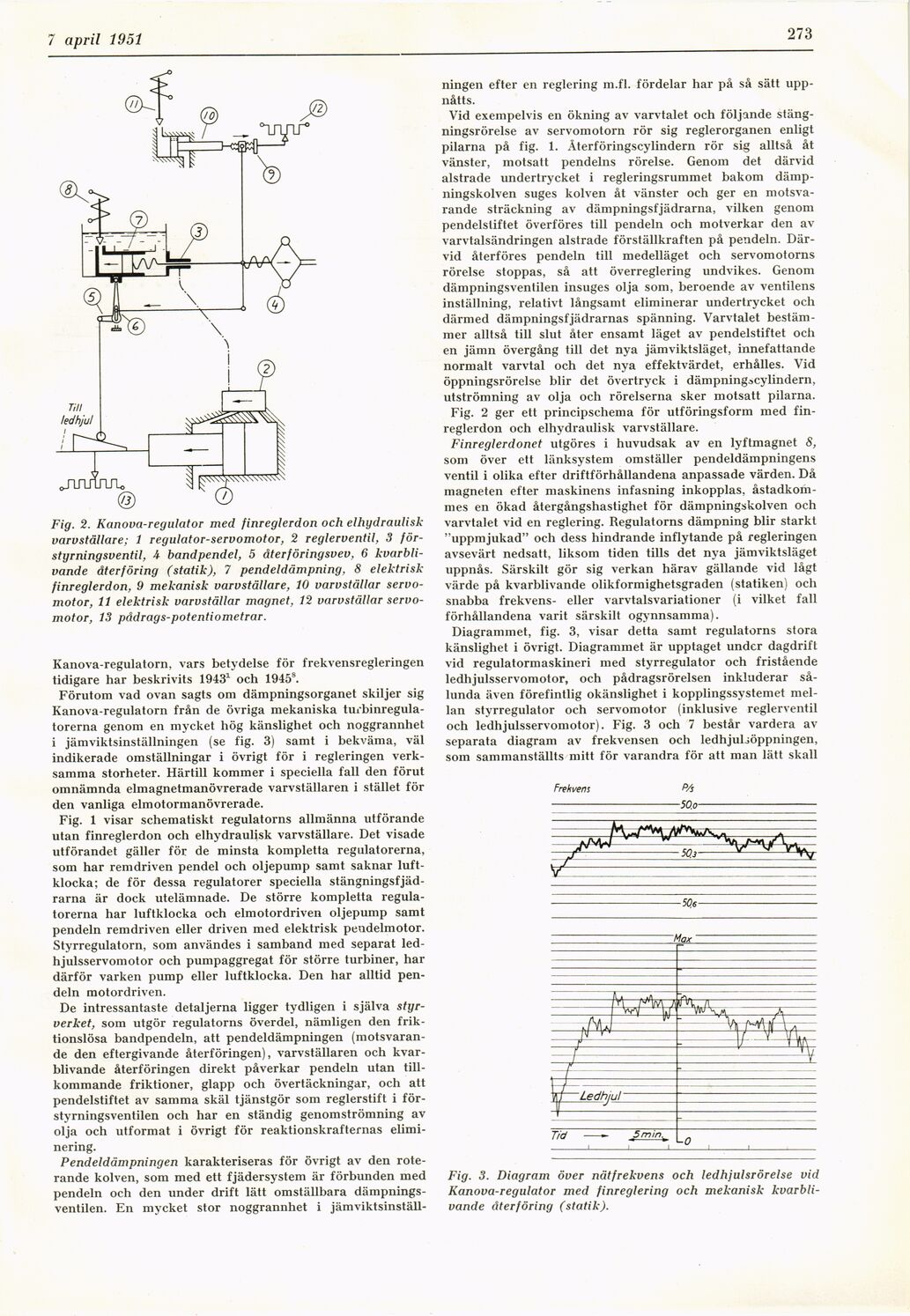
Fig. 2. Kanovci-regulator med finreglerdon och elhydraulisk
varvställare; 1 regulator-servomotor, 2 reglerventil, 3
förstyrning sventil, A bandpendel, 5 återföringsvev, 6
kvarblivande återföring (statik), 7 pendeldämpning, 8 elektrisk
finreglerdon, 9 mekanisk varvställare, 10 varvställar
servo-motor, 11 elektrisk varvställar magnet, 12 varvställar
servo-motor, 13 pådrags-potentiometrar.
Kanova-regulatorn, vars betydelse för frekvensregleringen
tidigare har beskrivits 19431 och 19458.
Förutom vad ovan sagts om dämpningsorganet skiljer sig
Kanova-regulatorn från de övriga mekaniska
tuibinregula-torerna genom en mycket hög känslighet och noggrannhet
i jämviktsinställningen (se fig. 3) samt i bekväma, väl
indikerade omställningar i övrigt för i regleringen
verksamma storheter. Härtill kommer i speciella fall den förut
omnämnda elmagnetmanövrerade varvställaren i stället för
den vanliga elmotormanövrerade.
Fig. 1 visar schematiskt regulatorns allmänna utförande
utan finreglerdon och elhydraulisk varvställare. Det visade
utförandet gäller för de minsta kompletta regulatorerna,
som har rem driven pendel och oljepump samt saknar
luftklocka; de för dessa regulatorer speciella
stängningsfjädrarna är dock utelämnade. De större kompletta
regulatorerna har luftklocka och elmotordriven oljepump samt
pendeln remdriven eller driven med elektrisk pendelmotor.
Styrregulatorn, som användes i samband med separat
led-hjulsservomotor och pumpaggregat för större turbiner, har
därför varken pump eller luftklocka. Den har alltid
pendeln motordriven.
De intressantaste detaljerna ligger tydligen i själva
styr-verket, som utgör regulatorns överdel, nämligen den
frik-tionslösa bandpendeln, att pendeldämpningen
(motsvarande den eftergivande återföringen), varvställaren och
kvarblivande återföringen direkt påverkar pendeln utan
tillkommande friktioner, glapp och övertäckningar, och att
pendelstiftet av samma skäl tjänstgör som reglerstift i
för-styrningsventilen och har en ständig genomströmning av
olja och utformat i övrigt för reaktionskrafternas
elimi-nering.
Pendeldämpningen karakteriseras för övrigt av den
roterande kolven, som med ett fjädersystem är förbunden med
pendeln och den under drift lätt omställbara
dämpningsventilen. En mycket stor noggrannhet i jämviktsinställ-
ningen efter en reglering m.fl. fördelar har på så sätt
uppnåtts.
Vid exempelvis en ökning av varvtalet och följande
stängningsrörelse av servomotorn rör sig reglerorganen enligt
pilarna på fig. 1. Återf öringscylindern rör sig alltså åt
vänster, motsatt pendelns rörelse. Genom det därvid
alstrade undertrycket i regleringsrummet bakom
dämpningskolven suges kolven åt vänster och ger en
motsvarande sträckning av dämpningsfjädrarna, vilken genom
pendelstiftet överföres till pendeln och motverkar den av
varvtalsändringen alstrade förställkraften på pendeln.
Därvid återföres pendeln till medelläget och servomotorns
rörelse stoppas, så att överreglering undvikes. Genom
dämpningsventilen insuges olja som, beroende av ventilens
inställning, relativt långsamt eliminerar undertrycket och
därmed dämpningsfjädrarnas spänning. Varvtalet
bestämmer alltså till slut åter ensamt läget av pendelstiftet och
en jämn övergång till det nya jämviktsläget, innefattande
normalt varvtal och det nya effektvärdet, erhålles. Vid
öppningsrörelse blir det övertryck i dämpningacylindern,
utströmning av olja och rörelserna sker motsatt pilarna.
Fig. 2 ger ett principschema för utföringsform med
finreglerdon och elhydraulisk varvställare.
Finreglerdonet utgöres i huvudsak av en lyftmagnet 8,
som över ett länksystem omställer pendeldämpningens
ventil i olika efter driftförhållandena anpassade värden. Då
magneten efter maskinens infasning inkopplas,
åstadkommes en ökad återgångshastighet för dämpningskolven och
varvtalet vid en reglering. Regulatorns dämpning blir starkt
"uppmjukad" och dess hindrande inflytande på regleringen
avsevärt nedsatt, liksom tiden tills det nva jämviktsläget
uppnås. Särskilt gör sig verkan härav gällande vid lågt
värde på kvarblivande olikformighetsgraden (statiken) och
snabba frekvens- eller varvtalsvariationer (i vilket fall
förhållandena varit särskilt ogynnsamma).
Diagrammet, fig. 3, visar detta samt regulatorns stora
känslighet i övrigt. Diagrammet är upptaget under dagdrift
vid regulatormaskineri med styrregulator och fristående
ledhjulsservomotor, och pådragsrörelsen inkluderar
sålunda även förefintlig okänslighet i kopplingssystemet
mellan styrregulator och servomotor (inklusive reglerventil
och ledhjulsservomotor). Fig. 3 och 7 består vardera av
separata diagram av frekvensen och ledhjuljöppningen,
som sammanställts mitt för varandra för att man lätt skall
Fig. 3. Diagram över nätfrekvens och ledhjulsrörelse vid
Kanova-regulator med finreglering och mekanisk
kvarblivande åter färing (statik).
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}