
Full resolution (JPEG) - On this page / på denna sida - H. 15. 15 april 1952 - Fartygsgeometri och matematisk formbestämning, av Nils Lidbro
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
15 april 1952
347
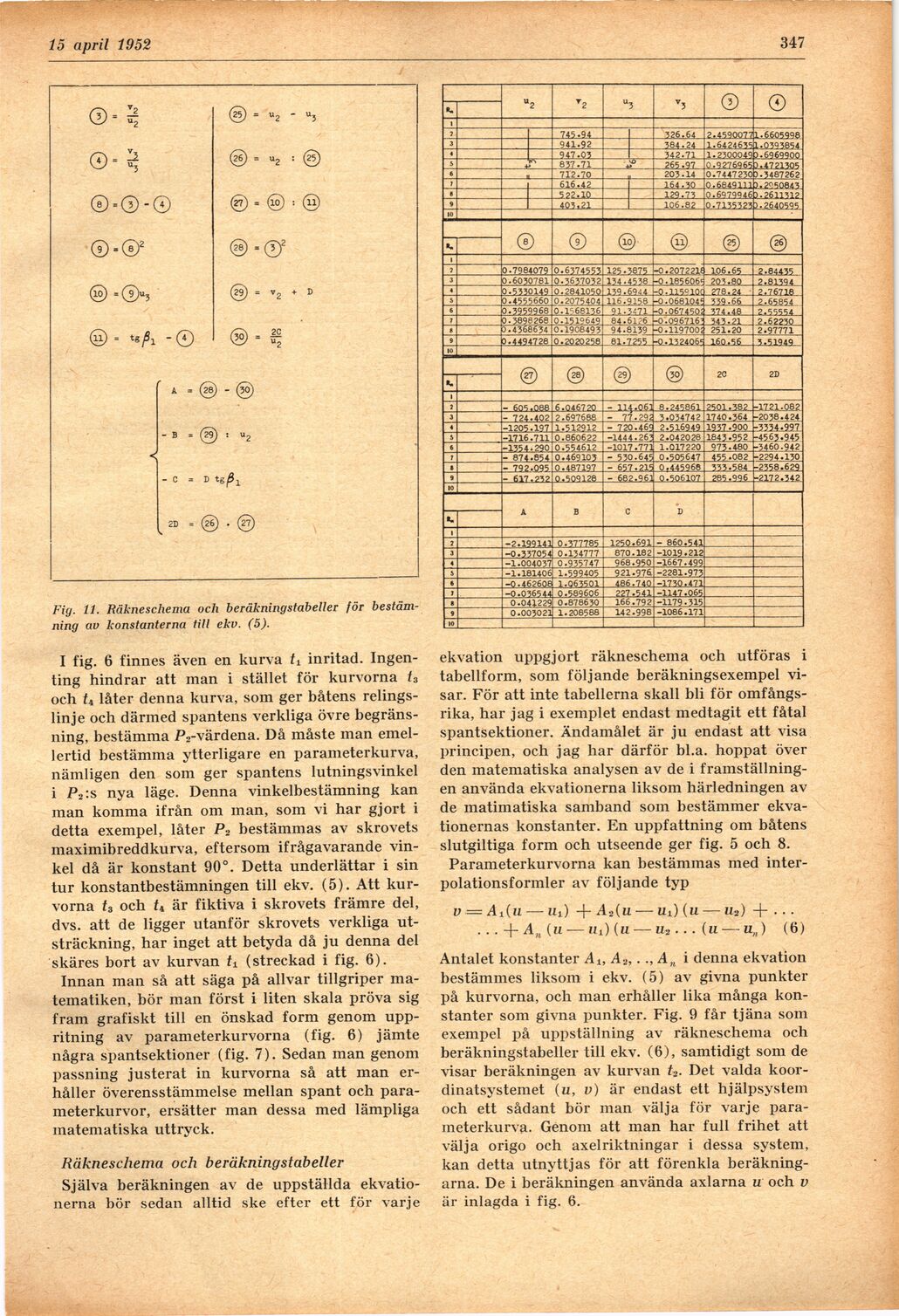
Fig. 11. Räkneschema och beräkningstabeller för
bestämning av konstanterna till ek v. (5).
I fig. 6 finnes även en kurva h inritad.
Ingenting hindrar att inan i stället för kurvorna t3
och ti låter denna kurva, som ger båtens
relingslinje och därmed spantens verkliga övre
begränsning, bestämma P2-värdena. Då måste man
emellertid bestämma ytterligare en parameterkurva,
nämligen den som ger spantens lutningsvinkel
i P2:s nya läge. Denna vinkelbestämning kan
man komma ifrån om man, som vi har gjort i
detta exempel, låter P2 bestämmas av skrovets
maximibreddkurva, eftersom ifrågavarande
vinkel då är konstant 90°. Detta underlättar i sin
tur konstantbestämningen till ekv. (5). Att
kurvorna 13 och ti är fiktiva i skrovets främre del,
dvs. att de ligger utanför skrovets verkliga
utsträckning, har inget att betyda då ju denna del
skäres bort av kurvan t± (streckad i fig. 6).
Innan man så att säga på allvar tillgriper
matematiken, bör man först i liten skala pröva sig
fram grafiskt till en önskad form genom
uppritning av parameterkurvorna (fig. 6) jämte
några spantsektioner (fig. 7). Sedan man genom
passning justerat in kurvorna så att man
erhåller överensstämmelse mellan spant och
parameterkurvor, ersätter man dessa med lämpliga
matematiska uttryck.
Räkneschema och beräkningstabeller
Själva beräkningen av de uppställda
ekvationerna bör sedan alltid ske efter ett för varje
ekvation uppgjort räkneschema och utföras i
tabellform, som följande beräkningsexempel
visar. För att inte tabellerna skall bli för
omfångsrika, har jag i exemplet endast medtagit ett fåtal
spantsektioner. Ändamålet är ju endast att visa
principen, och jag har därför bl.a. hoppat över
den matematiska analysen av de i
framställningen använda ekvationerna liksom härledningen av
de matimatiska samband soin bestämmer
ekvationernas konstanter. En uppfattning om båtens
slutgiltiga form och utseende ger fig. 5 och 8.
Parameterkurvorna kan bestämmas med
inter-polationsformler av följande typ
— Ut) +A2(U — ui)(u — u2) + ...
. .. 4- An (ii — iii) {ii — u2... (ii — un) (6)
Antalet konstanter Alt A3,.., An i denna ekvation
bestämmes liksom i ekv. (5) av givna punkter
på kurvorna, och man erhåller lika många
konstanter som givna punkter. Fig. 9 får tjäna som
exempel på uppställning av räkneschema och
beräkningstabeller till ekv. (6), samtidigt som de
visar beräkningen av kurvan t2. Det valda
koordinatsystemet (u, v) är endast ett hjälpsystem
och ett sådant bör man välja för varje
para-ineterkurva. Genom att man har full frihet att
välja origo och axelriktningar i dessa system,
kan detta utnyttjas för att förenkla
beräkningarna. De i beräkningen använda axlarna u och v
är inlagda i fig. 6.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}