
Full resolution (JPEG) - On this page / på denna sida - H. 26. 30 juni 1953 - Mekaniska räkneelement i luftvärnets eldledningsutrustning, av Gunnar Engdahl
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
540
TEKNISK TIDSKRIFT
digt vid målföljning eftersom man med enbart
hastighetsstyrning lätt kommer att pendla fram
och tillbaka över målet.
Rätvinkliga koordinater
De nya konstruktionsprinciper, som
framkommit under och efter andra världskriget, innebär
i första hand, att man utnyttjar andra metoder
för bestämning av målets rörelsetillstånd.
Inriktningen mot målet måste fortfarande ske i ett
polärt koordinatsystem. Då tidsderivatorna för ett
sådant systems mätelement {sv, hv och Ål)
endast i undantagsfall är konstanta, är det
lämpligt att bestämningen av framförpunkten sker i
ett jordfast rätvinkligt koordinatsystem. Med
den förutsättning, som inledningsvis angavs,
nämligen att målets rörelsevektor är konstant
under skjuttiden, blir härvid de rätvinkliga
ko-ordinaternas {x, y, z) tidsderivator (x, y, z)
konstanta. I ett instrument, som arbetar efter
principen med rätvinkliga koordinater, är det
dessutom ur konstruktionssynpunkt betydligt
enklare att utta den tidigare omtalade
parallax-korrektionen.
De polära koordinaterna sv, hv och Al omräk-
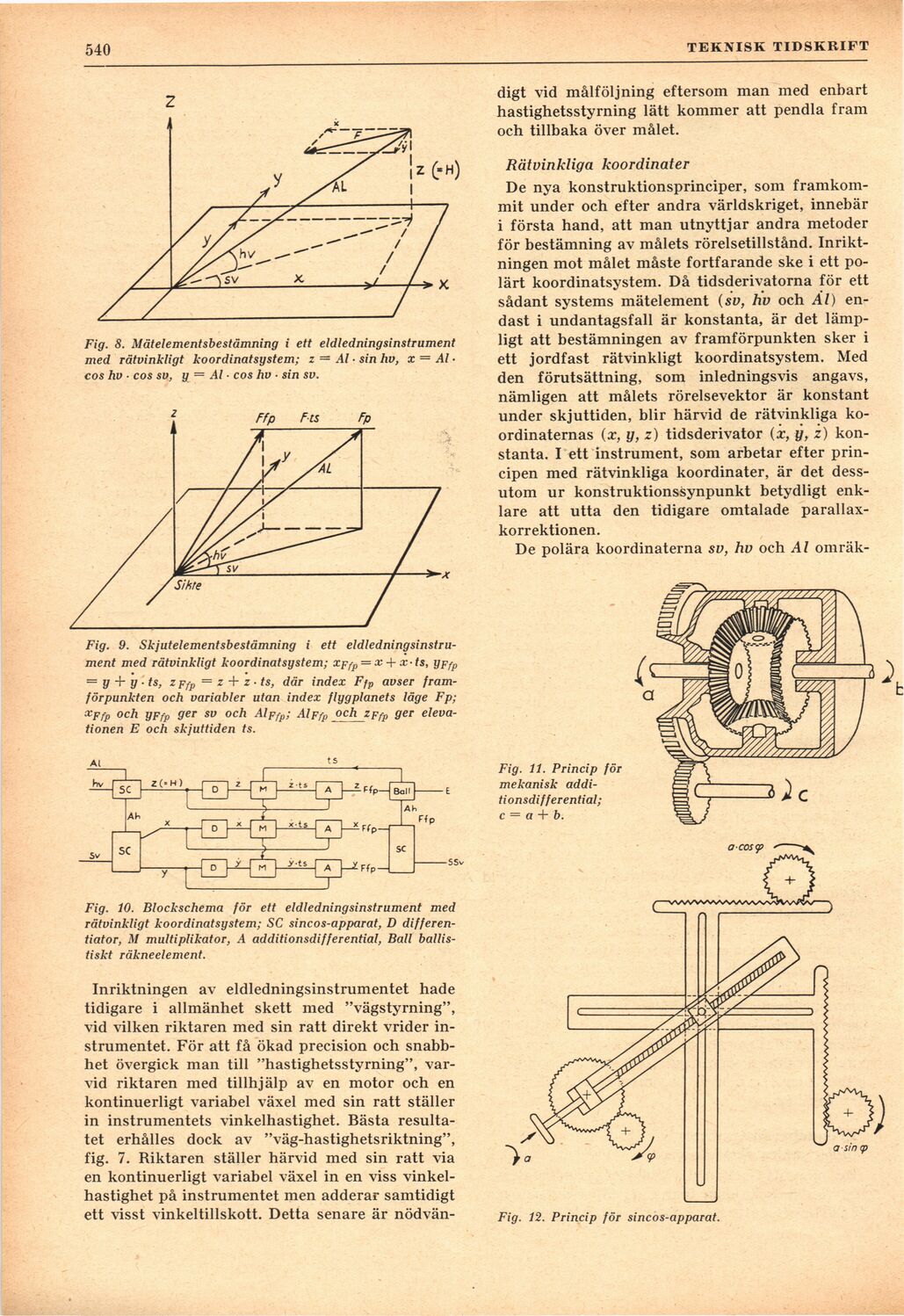
Fig. 8. Mätelementsbestämning i ett eldledningsinstrument
med rätvinkligt koordinatsystem; z = Al ■ sin hv, x = Al •
eos hv ■ eos sv, y = Al ■ eos hv ■ sin sv.
Fig. 11. Princip för
mekanisk
additionsdifferential;
c = a + b.
Fig. 12. Princip för sincos-apparat.
Fig. 9. Skjutelementsbeståmning i ett
eldledningsinstrument med rätvinkligt koordinatsystem; xpfp — x + x-ts, ypfp
= y + y ■ ts, z pfp — z + z ■ ts, där index Ffp avser
framförpunkten och variabler utan index flygplanets läge Fp;
xpfp och yFfp Qer sv och Alpfp; Alpfp och zpfp ger
elevationen E och skjuttiden ts.
Fig. 10. Blockschema för ett eldledningsinstrument med
rätvinkligt koordinatsystem; SC sincos-apparat, D
differen-tiator, M multiplikator, A additionsdifferential, Ball
ballis-tiskt räkneelement.
Inriktningen av eldledningsinstrumentet hade
tidigare i allmänhet skett med "vägstyrning",
vid vilken riktaren med sin ratt direkt vrider
instrumentet. För att få ökad precision och
snabbhet övergick man till "hastighetsstyrning",
varvid riktaren med tillhjälp av en motor och en
kontinuerligt variabel växel med sin ratt ställer
in instrumentets vinkelhastighet. Bästa
resultatet erhålles dock av "väg-hastighetsriktning",
fig. 7. Riktaren ställer härvid med sin ratt via
en kontinuerligt variabel växel in en viss
vinkelhastighet på instrumentet men adderar samtidigt
ett visst vinkeltillskott. Detta senare är nödvän-
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}