
Full resolution (JPEG) - On this page / på denna sida - H. 42. 16 november 1954 - Automatisk styrning av flygplan och robotar, av Sven Forsgren
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
16 november 1954
1009
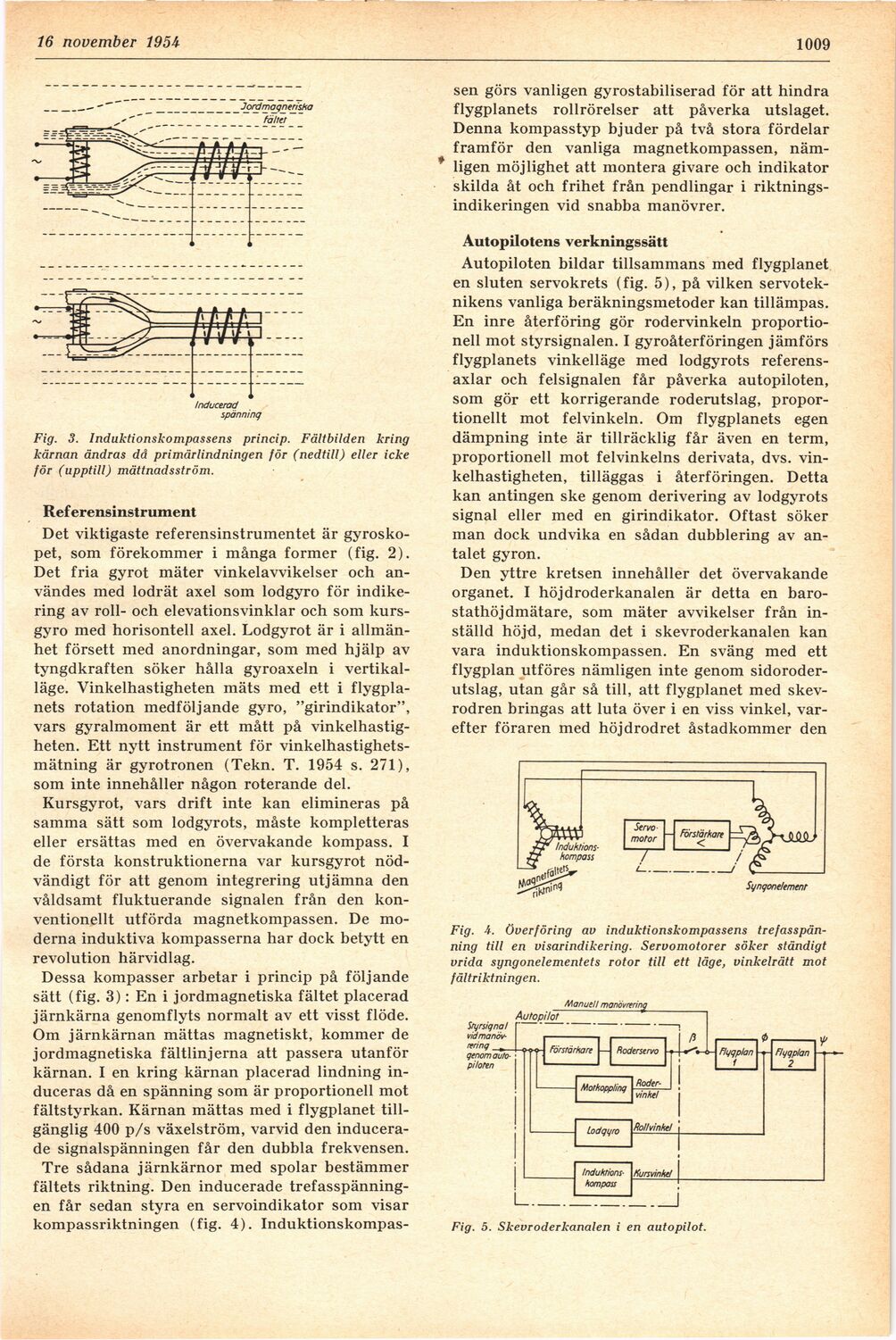
Fig. 3. Induktionskompassens princip. Fältbilden kring
kärnan ändras då primärlindningen för (nedtill) eller icke
för (upptill) mättnadsström.
Referensinstrument
Det viktigaste referensinstrumentet är
gyroskopet, som förekommer i många former (fig. 2).
Det fria gyrot mäter vinkelavvikelser och
användes med lodrät axel som lodgyro för
indikering av roll- och elevationsvinklar och som
kurs-gyro med horisontell axel. Lodgyrot är i
allmänhet försett med anordningar, som med hjälp av
tyngdkraften söker hålla gyroaxeln i
vertikalläge. Vinkelhastigheten mäts med ett i
flygplanets rotation medföljande gyro, "girindikator",
vars gyralmoment är ett mått på
vinkelhastigheten. Ett nytt instrument för
vinkelhastighets-mätning är gyrotronen (Tekn. T. 1954 s. 271),
som inte innehåller någon roterande del.
Kursgyrot, vars drift inte kan elimineras på
samma sätt som lodgyrots, måste kompletteras
eller ersättas med en övervakande kompass. I
de första konstruktionerna var kursgyrot
nödvändigt för att genom integrering utjämna den
våldsamt fluktuerande signalen från den
konventionellt utförda magnetkompassen. De
moderna induktiva kompasserna har dock betytt en
revolution härvidlag.
Dessa kompasser arbetar i princip på följande
sätt (fig. 3): En i jordmagnetiska fältet placerad
järnkärna genomflyts normalt av ett visst flöde.
Om järnkärnan mättas magnetiskt, kommer de
jordmagnetiska fältlinjerna att passera utanför
kärnan. I en kring kärnan placerad lindning
induceras då en spänning som är proportionell mot
fältstyrkan. Kärnan mättas med i flygplanet
tillgänglig 400 p/s växelström, varvid den
inducerade signalspänningen får den dubbla frekvensen.
Tre sådana järnkärnor med spolar bestämmer
fältets riktning. Den inducerade
trefasspänningen får sedan styra en servoindikator som visar
kompassriktningen (fig. 4). Induktionskompas-
sen görs vanligen gyrostabiliserad för att hindra
flygplanets rollrörelser att påverka utslaget.
Denna kompasstyp bjuder på två stora fördelar
framför den vanliga magnetkompassen,
nämligen möjlighet att montera givare och indikator
skilda åt och frihet från pendlingar i
riktnings-indikeringen vid snabba manövrer.
Autopilotens verkningssätt
Autopiloten bildar tillsammans med flygplanet
en sluten servokrets (fig. 5), på vilken
servotek-nikens vanliga beräkningsmetoder kan tillämpas.
En inre återföring gör rodervinkeln
proportionell mot styrsignalen. I gyroåterföringen jämförs
flygplanets vinkelläge med lodgyrots
referens-axlar och felsignalen får påverka autopiloten,
som gör ett korrigerande roderutslag,
proportionellt mot felvinkeln. Om flygplanets egen
dämpning inte är tillräcklig får även en term,
proportionell mot felvinkelns derivata, dvs.
vinkelhastigheten, tilläggas i återföringen. Detta
kan antingen ske genom derivering av lodgyrots
signal eller med en girindikator. Oftast söker
man dock undvika en sådan dubblering av
antalet gyron.
Den yttre kretsen innehåller det övervakande
organet. I höjdroderkanalen är detta en
baro-stathöjdmätare, som mäter avvikelser från
inställd höjd, medan det i skevroderkanalen kan
vara induktionskompassen. En sväng med ett
flygplan utföres nämligen inte genom
sidoroder-utslag, utan går så till, att flygplanet med
skevrodren bringas att luta över i en viss vinkel,
varefter föraren med höjdrodret åstadkommer den
Fig. överföring av induktionskompassens
trefasspän-ning till en visarindikering. Servomotorer söker ständigt
vrida syngonelementets rotor till ett läge, vinkelrätt mot
fältriktningen.
Fig. 5. Skevroderkanalen i en autopilot.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}