
Full resolution (JPEG) - On this page / på denna sida - H. 1. 3 januari 1956 - Flygnavigeringssystemet Tacan, av Sven Skåræus
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
i O januari 1956
9
styrs av en övertonskristall svängande med en frekvens som
är 1IZ1 av slutfrekvensen. Kristallen sitter i en
temperaturkontrollerad ugn tillsammans med andra kristaller avsedda
antingen som reserv eller för andra frekvenser.
Från ett av tripplarstegen uttas en signal som
lokaloscil-latorfrekvens till mottagarens blandare. Därigenom vinner
man den fördelen att avstämning av sändaren automatiskt
leder till rätt mottagarefrekvens.
Drivenheten täcker endast halva antalet kanaler, t.ex.
1—63. Om man önskar övergå till det övre bandet, måste
enheten bytas ut. Drivenheten lämnar ca 10 W till
klystronens ingångskavitet. Signalnivån höjs här till en
toppeffekt av lägst 7 kW i pulsad form. Klystronen är
uppbyggd av tre kaviteter med induktiv koppling vid
ingång och utgång. Varje kavitet är försedd med
kristalldetektor för kontroll av avstämningen, som sker med
endast en ratt, mekaniskt kopplad till de tre kaviteterna. Fyra
spolar fordras för fokusering och katoden har anslutits
till —15 kV, varvid den fördelen vinns att rörets övriga
delar ligger på eller i närheten av jordpotential.
Sändarpulserna matas via en omkopplare
sändare—mottagare till antennen. Omkopplaren är av passiv typ och
utnyttjar förhållandet att mottagna signaler ligger 63 MHz
från utgående signal. I anslutning till omkopplaren finns
en riktningskopplare, där mätningar av effekt, känslighet
etc. kan utföras.
Antennrotationen åstadkommes av en asynkronmotor
som via en variabel koppling driver runt skivan med
sekundärstrålarna. En tachogenerator ger en spänning som
jämföres med en högstabil referensgenerator och den
erhållna felspänningen matas via en förstärkare till ett
reläsystem i den variabla kopplingen. Motorn roterar hela
tiden med högre hastighet än 900 r/m och graden av
koppling bestämmer erforderlig varvtalsreducering. Härigenom
har man nått sådana fördelar som ringa effekt för
kontrollorganet — en kompakt magnetisk förstärkare —
samtidigt som start och acceleration upp till normal hastighet
sker mjukt utan större mekaniska påkänningar.
Synkront med antennen roterar en skiva med en
ingjuten plugg av magnetiskt material mellan ett antal
sond-spolar. Antennrotationen överförs med ett servosystem där
vid fartygsinstallationer informationer från
gyrokompas-sen kan införas. Normalt är spolarna placerade åtskilda
40° och orienterade i rätta kompassriktningar men via ett
servosystem kan önskad förskjutning införas för vissa
ändamål. Sondspolarna ger markeringspulserna uppdelade
i norrpuls och nio 40° pulser.
Frågesignal från ett flygplan för bestämning av dess
avstånd matas av växlaren in i markmottagarens blandare
där den blandas med lokaloscillatorfrekvensen till 63 MHz
mellanfrekvenssignal. Efter förstärkaren går den till
huvudförstärkaren där förstärkning sker till lämplig nivå
samtidigt som signaler från angränsande kanaler
undertrycks. En bandbredd om 3,5 MHz erhålles som genom
en Ferris diskriminator reduceras till ± 250 kHz.
Videosignalen matas in i en grindkrets, som endast
släpper fram signal i form av dubbelpulser med ett inbördes
avstånd av 12 (is. Utsorteringen möjliggöres med en
fördröjningslinje på 12 (is. Den utvalda signalen utgörs,
förutom av frågepulsen, även av den del av det slumpvis
uppträdande bruset från mottagaren som förekommer i form
av korrekta dubbelpulser. Om amplituden hos signalen
överstiger en viss justerbar nivå förmår den styra en
mul-tivibrator i grindkretsen som genererar en enkelpuls av
bestämd längd och amplitud för varje dubbelpuls. Av
videosignalen från andra detektorn i mellanfrekvensförstärkaren
återstår således endast en serie enkelpulser
representerande frågepulsen och brus.
Enkelpulserna matas till en fördröjningslinje om 50 (is
och därefter till en krets, som begränsar antalet
enkelpulser till ca 2 700 per sekund. Därefter matas dessa till
en pulsväljare där de blandas med en serie andra pulser,
norrpuls, markeringspuls och identifieringspuls.
Norrpulsen styr en oscillator med frekvensen 33x/3 kHz
på sådant sätt att 12 pulser, inbördes åtskilda 30 (is,
genereras. På liknande sätt aktiverar markeringspulserna en
generator med frekvensen 412/s kHz så att 6 pulser,
inbördes åtskilda 24 (.is, erhålles. En roterande skiva med
kammar svarande mot stationssignalen utlöser en serie
pulser från en 2,7 kHz generator. Pulsväljaren sorterar ut
ett pulståg enligt följande mönster. Norr- och
markeringspulserna är alltid närvarande. Mellanrummen mellan dessa
grupper utfylles av frågepulser (som nu bör benämnas
svarspulser efter analysen i videokedjan), de slumpvis
förekommande bruspulserna samt pulserna för
stationssignalen.
Det resulterade pulståget matas in i en
dubbelpulsgene-rator, där varje puls formas om till en dubbelpuls om
3,2 (is och ett inbördes avstånd om 12 |xs. Efter
förstärkning i modulatorn matas de in på klystronens
module-ringselektrod.
Flygburen utrustning
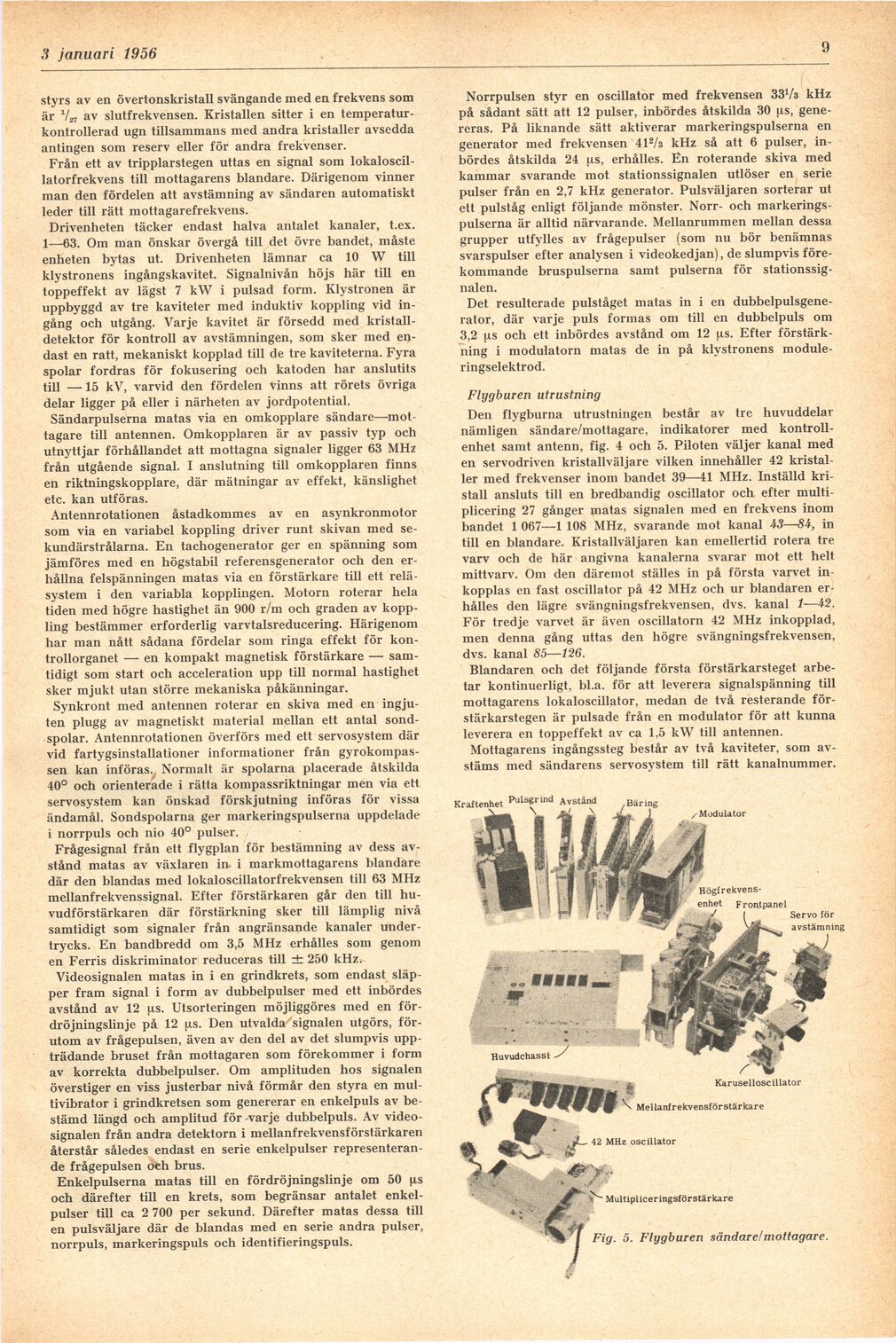
Den flygburna utrustningen består av tre huvuddelar
nämligen sändare/mottagare, indikatorer med
kontrollenhet samt antenn, fig. 4 och 5. Piloten väljer kanal med
en servodriven kristallväljare vilken innehåller 42
kristaller med frekvenser inom bandet 39—41 MHz. Inställd
kristall ansluts till en bredbandig oscillator och efter
multi-plicering 27 gånger matas signalen med en frekvens inom
bandet 1 067—1 108 MHz, svarande mot kanal A3—8A, in
till en blandare. Kristallväljaren kan emellertid rotera tre
varv och de här angivna kanalerna svarar mot ett helt
mittvarv. Om den däremot ställes in på första varvet in
kopplas en fast oscillator på 42 MHz och ur biandaren
erhålles den lägre svängningsfrekvensen, dvs. kanal 1—42.
För tredje varvet är även oscillatorn 42 MHz inkopplad,
men denna gång uttas den högre svängningsfrekvensen,
dvs. kanal 85—126.
Biandaren och det följande första förstärkarsteget
arbetar kontinuerligt, bl.a. för att leverera signalspänning till
mottagarens lokaloscillator, medan de två resterande
för-stärkarstegen är pulsade från en modulator för att kunna
leverera en toppeffekt av ca 1,5 kW till antennen.
Mottagarens ingångssteg består av två kaviteter, som
avstäms med sändarens servosystem till rätt kanalnummer.
Fig. 5. Flygburen sändare!mottagare.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}