
Full resolution (JPEG) - On this page / på denna sida - 1958, H. 29 - Havsvågor och fartygsrörelser, av Curt Falkemo
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Havsvågor och
fartygsrörelser
Professor Curt Falkemo, Göteborg
532.593 : 532.583.4
Under senare år liar ett stort intresse för
fartygs uppträdande i vågor återspeglats i den
skeppsbyggnadstekniska litteraturen. Man
måste numera ha noggranna uppgifter om
amplituder och accelerationer hos ett fartygs
rörelser till sjöss. Skälet är den tekniska
utvecklingen hos anordningar, som skall användas
ombord, t.ex. kanoner med hög eldhastighet,
stabiliseringsanläggningar med känsliga gyron,
fartyg där flygplan skall landa och starta,
ut-skjutningsanordningar för robotar m.m.
När det gäller handelsfartyg har intresset
främst koncentrerat sig kring de
hållfasthets-påkänningar, som uppträder i skrovet, men
även frågan om fartygens genomsnittsfart på
vissa rutter och under olika
väderleksförhållanden samt passagerarnas komfort har
tilldragit sig intresse. Man kan därför klassificera
litteraturen efter tre grupper av problem,
nämligen sådana där
fartygets rörelser efterfrågas,
fartygets fart (motstånd) efterfrågas,
skrovspänningarna efterfrågas.
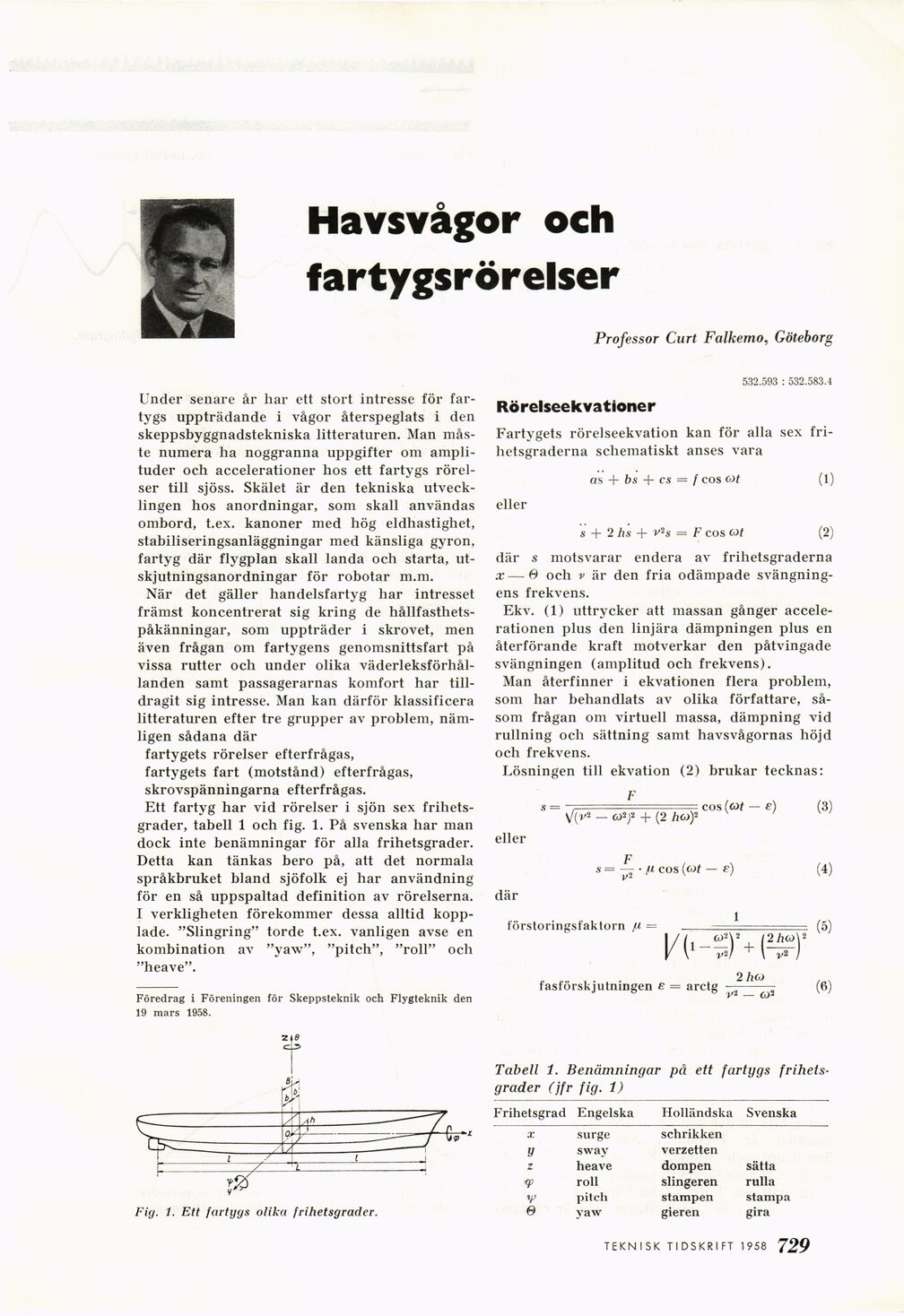
Ett fartyg har vid rörelser i sjön sex
frihetsgrader, tabell 1 och fig. 1. På svenska har man
dock inte benämningar för alla frihetsgrader.
Detta kan tänkas bero på, att det normala
språkbruket bland sjöfolk ej har användning
för en så uppspaltad definition av rörelserna.
I verkligheten förekommer dessa alltid
kopplade. "Slingring" torde t.ex. vanligen avse en
kombination av "yaw", "pitch", "roll" och
"heave".
Föredrag i Föreningen för Skeppsteknik och Flygteknik den
19 mars 1958.
Rörelseekvationer
Fartygets rörelseekvation kan för alla sex
frihetsgraderna schematiskt anses vara
os + bs + cs = f eos at (1)
eller
s + 2 h’s + v2s = F eos at (2)
där s motsvarar endera av frihetsgraderna
x—6 och v är den fria odämpade
svängningens frekvens.
Ekv. (1) uttrycker att massan gånger
accelerationen pius den linjära dämpningen pius en
återförande kraft motverkar den påtvingade
svängningen (amplitud och frekvens).
Man återfinner i ekvationen flera problem,
som har behandlats av olika författare,
såsom frågan om virtuell massa, dämpning vid
rullning och sättning samt havsvågornas höjd
och frekvens.
Lösningen till ekvation (2) brukar tecknas:
y/(V2 _ ci^-f + (2 haf
eos {at — e)
eller
s = —- • u eos {at
där
förstoringsfaktorn /u =
haV-
2 hco
fasförskjutningen e = arctg —-
(3)
(4)
(5)
(6)
Tabell 1. Benämningar på ett fartygs
frihetsgrader (jfr fig. 1)
Frihetsgrad Engelska Holländska Svenska
x surge schrikken
y sway verzetten
z heave dompen sätta
<<p roll slingeren rulla
V pitch stampen stampa
& yaw gieren gira
Fig. 1. Ett fartygs olika frihetsgrader.
155 TEKNIS K TIDSKRIFT 1958
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}