
Full resolution (JPEG) - On this page / på denna sida - 1958, H. 34 - Nya metoder - Colcrete-betong, av Anders Bergström - Flygnavigering enligt dopplerprincipen, av D H
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
cementvällingen att passera det 3 mm smala
mellanrummet mellan skivan och höljet, tills blandningen
är fullständigt homogen och cementpartiklarna är
i kolloidal lösning. Efter 15 s i den första
biandaren ledes lösningen över till den andra något
större behållaren, där sand tillsättes och blandas
på principiellt samma sätt, varvid dock stålskivan
här är ersatt av en robust centrifugalpump.
Efter ytterligare 10-—15 s blandningstid pumpas
blandningen med 1,5 at tryck genom en upp till
50 m lång gummislang till gjutningsplatsen.
Col-crete-betong uppges vinna i både hållfasthet och
täthet när den gjutes under vatten. Den första
Col-crete-anläggningen i Danmark har nyligen kommit
i drift och skall prövas på skilda byggnadsplatser
(Ingeniören A 1958 h. 13 s. 1). Anders Bergström
Flygnavigering enligt dopplerprincipen
En navigeringsanläggning för flygplan, vilken är
helt oberoende av radioförbindelse med
markbaserade fyrar och sålunda är dels oberoende av
flygplanets avstånd till dessa och dels är praktiskt taget
ostörbar, har utvecklats i USA. Anläggningen, som
i princip är en dopplerradar, mäter flygplanets
verkliga fart relativt jorden samt planets avdriftsvinkel.
I kombination med en noggrann gyrokompass kan
anläggningen beräkna flygplanets position i longitud
och latitud.
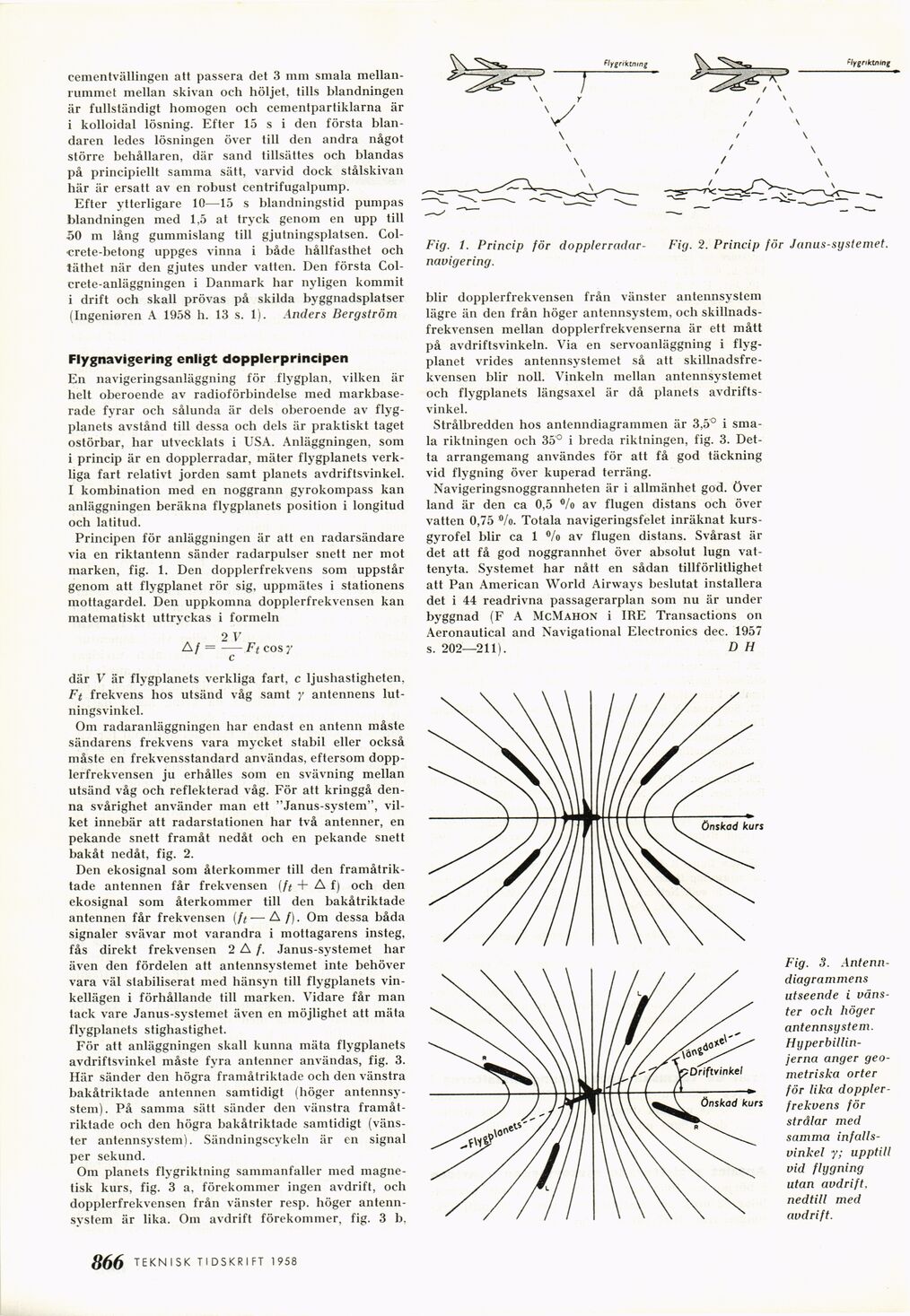
Principen för anläggningen är att en radarsändare
via en riktantenn sänder radarpulser snett ner mot
marken, fig. 1. Den dopplerfrekvens som uppstår
genom att flygplanet rör sig, uppmätes i stationens
mottagardel. Den uppkomna dopplerfrekvensen kan
matematiskt uttrvckas i formeln
A/
2 V
Ft eos 7
där V är flygplanets verkliga fart, c ljushastigheten.
Ft frekvens hos utsänd våg samt y antennens
lutningsvinkel.
Om radaranläggningen har endast en antenn måste
sändarens frekvens vara mycket stabil eller också
måste en frekvensstandard användas, eftersom
dopplerfrekvensen ju erhålles som en svävning mellan
utsänd våg och reflekterad våg. För att kringgå
denna svårighet använder man ett "Janus-system",
vilket innebär att radarstationen har två antenner, en
pekande snett framåt nedåt och en pekande snett
bakåt nedåt, fig. 2.
Den ekosignal som återkommer till den
framåtrik-tade antennen får frekvensen (ft + A f) och den
ekosignal som återkommer till den bakåtriktade
antennen får frekvensen (ft—A /). Om dessa båda
signaler svävar mot varandra i mottagarens insteg,
fås direkt frekvensen 2 A /. Janus-systemet har
även den fördelen att antennsystemet inte behöver
vara väl stabiliserat med hänsyn till flygplanets
vinkellägen i förhållande till marken. Vidare får man
tack vare Janus-systemet även en möjlighet att mäta
flygplanets stighastighet.
För att anläggningen skall kunna mäta flygplanets
avdriftsvinkel måste fvra antenner användas, fig. 3.
Här sänder den högra framåtriktade och den vänstra
bakåtriktade antennen samtidigt (höger
antennsystem). På samma sätt sänder den vänstra
framåtriktade och den högra bakåtriktade samtidigt
(vänster antennsystem). Sändningscykeln är en signal
per sekund.
Om planets flygriktning sammanfaller med
magnetisk kurs, fig. 3 a, förekommer ingen avdrift, och
dopplerfrekvensen från vänster resp. höger
antenn-svstem är lika. Om avdrift förekommer, fig. 3 b.
Fig. 1. Princip för
dopplerradar-navigering.
Fig. 2. Princip för Janus-systemet.
blir dopplerfrekvensen från vänster antennsystem
lägre än den från höger antennsystem, och
skillnadsfrekvensen mellan dopplerfrekvenserna är ett mått
på avdriftsvinkeln. Via en servoanläggning i
flygplanet vrides antennsystemet så att
skillnadsfrekvensen blir noll. Vinkeln mellan antennsystemet
och flygplanets längsaxel är då planets
avdriftsvinkel.
Strålbredden hos antenndiagrammen är 3,5° i
smala riktningen och 35° i breda riktningen, fig. 3.
Detta arrangemang användes för att få god täckning
vid flygning över kuperad terräng.
Navigeringsnoggrannheten är i allmänhet god. Över
land är den ca 0,5 %> av flugen distans och över
vatten 0,75 %. Totala navigeringsfelet inräknat
kurs-gyrofel blir ca 1 °/o av flugen distans. Svårast är
det att få god noggrannhet över absolut lugn
vattenyta. Systemet har nått en sådan tillförlitlighet
att Pan American World Airways beslutat installera
det i 44 readrivna passagerarplan som nu är under
byggnad (F A McMahon i I RE Transactions ön
Aeronautical and Navigational Electronics dec. 1957
s. 202—211). D H
Fig. 3.
Antenndiagrammens
utseende i
vänster ocli höger
antennsystem. [-Hyperbillin-jerna-]
{+Hyperbillin-
jerna+} anger
geometriska orter
för lika
dopplerfrekvens för
strålar med
samma
infallsvinkel y; upptill
vid flygning
utan avdrift.
nedtill med
avdrift.
TEKNISK TIDSKRIFT 1958 5 79
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}