
Full resolution (JPEG) - On this page / på denna sida - 1959, H. 8 - Numerisk formgivning, av Börje Langefors
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
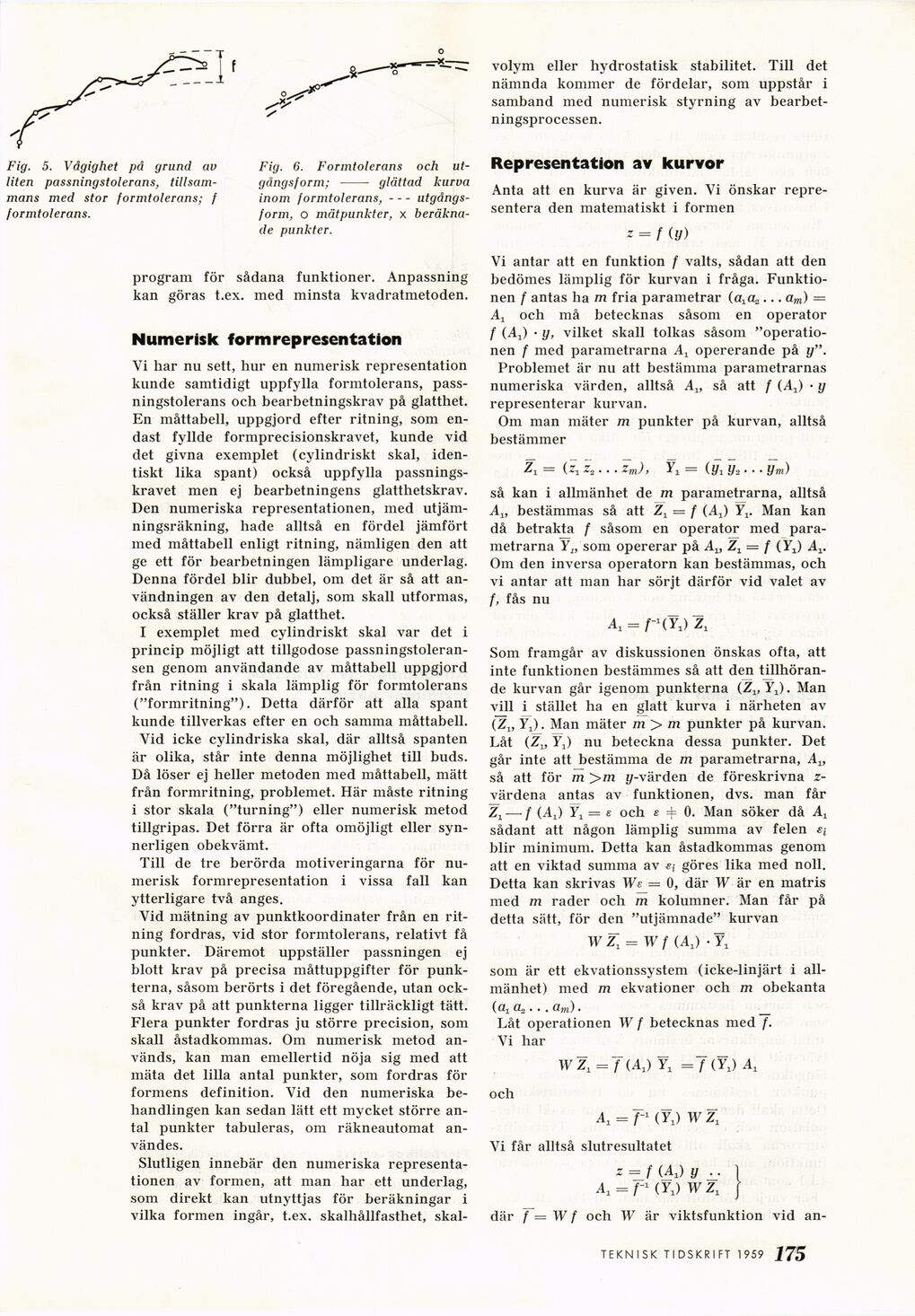
Fig. 5. Vågighet på grund av
liten passningstolerans,
tillsammans med stor formtolerans; f
formtolerans.
Fig. 6. Formtolerans och
utgångsform; - glättad kurva
inom
formtolerans,–-utgångsform, o mätpunkter, x
beräknade punkter.
program för sådana funktioner. Anpassning
kan göras t.ex. med minsta kvadratmetoden.
Numerisk form representation
Vi har nu sett, hur en numerisk representation
kunde samtidigt uppfylla formtolerans,
passningstolerans och bearbetningskrav på glatthet.
En måttabell, uppgjord efter ritning, som
endast fyllde formprecisionskravet, kunde vid
det givna exemplet (cylindriskt skal,
identiskt lika spant) också uppfylla
passningskravet men ej bearbetningens glatthetskrav.
Den numeriska representationen, med
utjämningsräkning, hade alltså en fördel jämfört
med måttabell enligt ritning, nämligen den att
ge ett för bearbetningen lämpligare underlag.
Denna fördel blir dubbel, om det är så att
användningen av den detalj, som skall utformas,
också ställer krav på glatthet.
I exemplet med cylindriskt skal var det i
princip möjligt att tillgodose
passningstoleransen genom användande av måttabell uppgjord
från ritning i skala lämplig för formtolerans
("formritning"). Detta därför att alla spant
kunde tillverkas efter en och samma måttabell.
Vid icke cylindriska skal, där alltså spanten
är olika, står inte denna möjlighet till buds.
Då löser ej heller metoden med måttabell, mätt
från formritning, problemet. Här måste ritning
i stor skala ("turning") eller numerisk metod
tillgripas. Det förra är ofta omöjligt eller
synnerligen obekvämt.
Till de tre berörda motiveringarna för
numerisk formrepresentation i vissa fall kan
ytterligare två anges.
Vid mätning av punktkoordinater från en
ritning fordras, vid stor formtolerans, relativt få
punkter. Däremot uppställer passningen ej
blott krav på precisa måttuppgifter för
punkterna, såsom berörts i det föregående, utan
också krav på att punkterna ligger tillräckligt tätt.
Flera punkter fordras ju större precision, som
skall åstadkommas. Om numerisk metod
används, kan man emellertid nöja sig med att
mäta det lilla antal punkter, som fordras för
formens definition. Vid den numeriska
behandlingen kan sedan lätt ett mycket större
antal punkter tabuleras, om räkneautomat
användes.
Slutligen innebär den numeriska
representationen av formen, att man har ett underlag,
som direkt kan utnyttjas för beräkningar i
vilka formen ingår, t.ex. skalhållfasthet, skal-
volym eller hydrostatisk stabilitet. Till det
nämnda kommer de fördelar, som uppstår i
samband med numerisk styrning av
bearbetningsprocessen.
Representation av kurvor
Anta att en kurva är given. Vi önskar
representera den matematiskt i formen
* = f (ff)
Vi antar att en funktion f valts, sådan att den
bedömes lämplig för kurvan i fråga.
Funktionen / antas ha m fria parametrar (a^cu ... am) =
Ax och må betecknas såsom en operator
f (AJ • y, vilket skall tolkas såsom
"operationen f med parametrarna Ax opererande på y".
Problemet är nu att bestämma parametrarnas
numeriska värden, alltså Alt så att f (AJ • y
representerar kurvan.
Om man mäter m punkter på kurvan, alltså
bestämmer
Z, = (zxz2... zm), Y1 = (z/j y2... ym)
så kan i allmänhet de m parametrarna, alltså
Alt bestämmas så att Z\ — f (AJ Yx. Man kan
då betrakta f såsom en operator med
parametrarna Yj, som opererar på Alt Z1 — f (YJ Ax.
Om den inversa operatorn kan bestämmas, och
vi antar att man har sörjt därför vid valet av
f, fås nu
A, = r(YJ Zx
Som framgår av diskussionen önskas ofta, att
inte funktionen bestämmes så att den
tillhörande kurvan går igenom punkterna (Zv YJ. Man
vill i stället ha en glatt kurva i närheten av
(Zj, YJ. Man mäter m > m punkter på kurvan.
Låt (Z„ YJ nu beteckna dessa punkter. Det
går inte att bestämma de m parametrarna, Av
så att för m >m {/-värden de föreskrivna
z-värdena antas av funktionen, dvs. man får
Zx — / (AJ Yj = s och E ‡ 0. Man söker då At
sådant att någon lämplig summa av felen
blir minimum. Detta kan åstadkommas genom
att en viktad summa av göres lika med noll.
Detta kan skrivas Ws = 0, där W är en matris
med m rader och m kolumner. Man får på
detta sätt, för den "utjämnade" kurvan
WZ, = Wf (AJ • Yx
som är ett ekvationssystem (icke-linjärt i
allmänhet) med m ekvationer och m obekanta
(ax Oj... am). _
Låt operationen W f betecknas med /’.
Vi har
W Z1 = f (AJ Yx = f (YJ Ax
och
A1 = r (YJ WZ1
Vi får alltså slutresultatet
z = f (AJ y „
A± = r (Yl) WZ±
där f = Wf och W är viktsfunktion vid an-
TEKNISK TIDSKRIFT 1959 <51
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}