
Full resolution (JPEG) - On this page / på denna sida - 1962, H. 9 - Radarteknikens utveckling, av Nils-H Lundquist
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
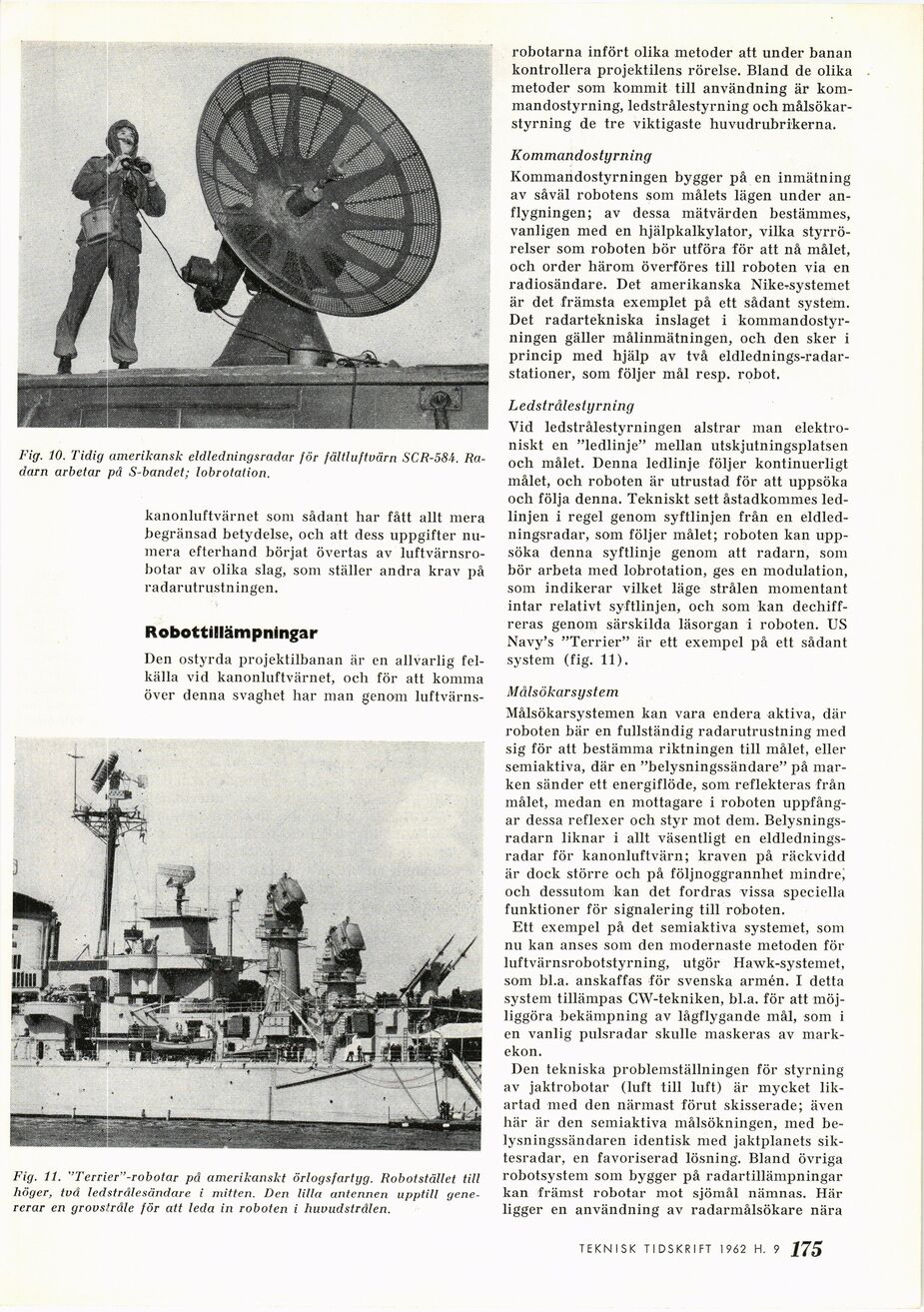
Fig. 10. Tidig amerikansk eldledningsradar för fältluftvärn SCR-584.
Radarn arbetar pä S-bandet; lobrotation.
kanonliiftvärnet som sådant liar fått allt mera
begränsad betydelse, och att dess uppgifter
numera efterhand börjat övertas av
luftvärnsrobotar av olika slag, som ställer andra krav på
radarutrustningen.
Robottillämpningar
Den ostyrda projektilbanan är en allvarlig
felkälla vid kanonluftvärnet, och för att komma
över denna svaghet har man genom luftvärns-
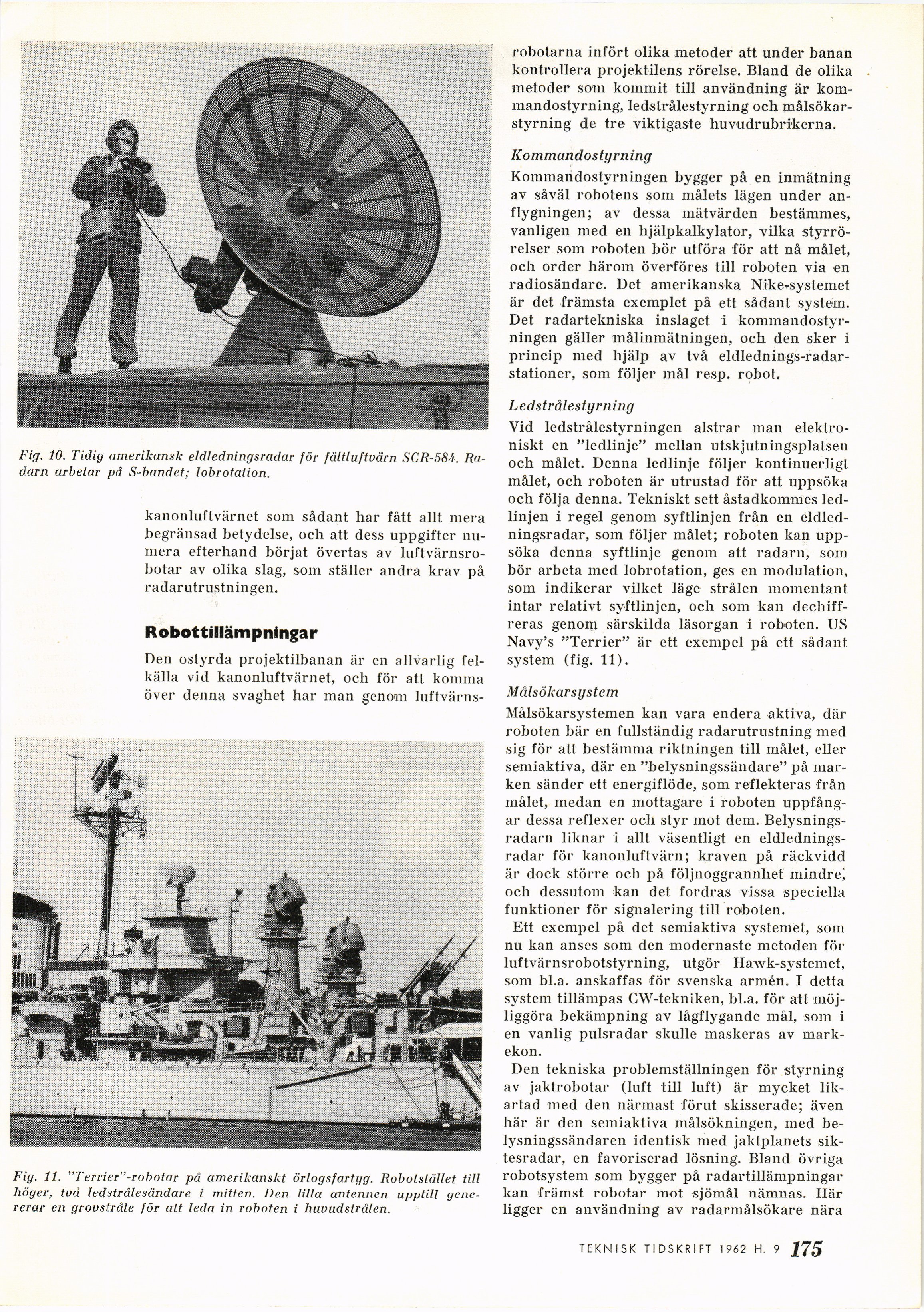
Fig. 11. "Terrier"-robotar pä amerikanskt örlogsfartyg. Robotstället till
höger, två ledstrålesändare i mitten. Den lilla antennen upptill
genererar en grovstråle för att leda in roboten i huvudstrålen.
robotarna infört olika metoder att under banan
kontrollera projektilens rörelse. Bland de olika
metoder som kommit till användning är
kommandostyrning, ledstrålestyrning och
målsökar-styrning de tre viktigaste huvudrubrikerna.
Kommandostyrning
Kommandostyrningen bygger på en inmätning
av såväl robotens som målets lägen under
an-flygningen; av dessa mätvärden bestämmes,
vanligen med en hjälpkalkylator, vilka
styrrörelser som roboten bör utföra för att nå målet,
och order härom överföres till roboten via en
radiosändare. Det amerikanska Nike-systemet
är det främsta exemplet på ett sådant system.
Det radartekniska inslaget i
kommandostyrningen gäller målinmätningen, och den sker i
princip med hjälp av två
eldlednings-radarstationer, som följer mål resp. robot.
Ledstrålestyrning
Vid ledstrålestyrningen alstrar man
elektroniskt en "ledlinje" mellan utskjutningsplatsen
och målet. Denna ledlinje följer kontinuerligt
målet, och roboten är utrustad för att uppsöka
och följa denna. Tekniskt sett åstadkommes
ledlinjen i regel genom syftlinjen från en
eldled-ningsradar, som följer målet; roboten kan
uppsöka denna syftlinje genom att radarn, som
bör arbeta med lobrotation, ges en modulation,
som indikerar vilket läge strålen momentant
intar relativt syftlinjen, och som kan
dechiff-reras genom särskilda läsorgan i roboten. US
Navy’s "Terrier" är ett exempel på ett sådant
system (fig. 11).
Målsökar sy stern
Målsökarsystemen kan vara endera aktiva, där
roboten bär en fullständig radarutrustning med
sig för alt bestämma riktningen till målet, eller
semiaktiva, där en "belysningssändare" på
marken sänder ett energiflöde, som reflekteras från
målet, medan en mottagare i roboten
uppfångar dessa reflexer och styr mot dem.
Belysningsradarn liknar i allt väsentligt en
eldlednings-radar för kanonluftvärn; kraven på räckvidd
är dock större och på följnoggrannhet mindrei
och dessutom kan det fordras vissa speciella
funktioner för signalering till roboten.
Ett exempel på det semiaktiva systemet, som
nu kan anses som den modernaste metoden för
luftvärnsrobotstyrning, utgör Hawk-systemet,
som bl.a. anskaffas för svenska armén. I detta
system tillämpas CW-tekniken, bl.a. för att
möjliggöra bekämpning av lågflygande mål, som i
en vanlig pulsradar skulle maskeras av
markekon.
Den tekniska problemställningen för styrning
av jaktrobotar (luft till luft) är mycket
likartad med den närmast förut skisserade; även
här är den semiaktiva målsökningen, med
belysningssändaren identisk med jaktplanets
siktesradar, en favoriserad lösning. Bland övriga
robotsystem som bygger på radartillämpningar
kan främst robotar mot sjömål nämnas. Här
ligger en användning av radarmålsökare nära
TEKNISK TIDSKRIFT 1962 H. 9 j[f}3
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}