
Full resolution (JPEG) - On this page / på denna sida - 1962, H. 20 - Markroboten Blue Water, av Olle Ljungström
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Markroboten
Blue Water
stort räckviddsområde som 8—125 km. Den
styrs med ett tröghetsnavigeringssystem (TN).
Blue Water har kärnstridsladdning, enligt
uppgift i 5—1 O-kilotons klassen.
Vapensystemet har utformats för lägsta möjliga vikt hos
robot med utrustning, för stor rörlighet i
lättare terräng, samt med tanke på snabb
eldinsats.
Systemuppbyggnad
En Blue Water-eldenhet består av en robot, ett
kombinerat transport- och lavettfordon för
roboten (robotfordonet) samt en markkalkylator
monterad i en specialbil med stor hjulbas.
Vidare ingår ett fordon för robotservice och ett
fordon som medför provningsutrustning. De
båda sistnämnda fordonen kan betjäna ett
flertal eldenheter. Robotens huvuddata är:
längd ................................... 8,1 m
diameter ................................ 0,6 m
spännvidd, vingar ....................... 2,06 m
spännvidd, fenor ........................ 1,96 m
största fart, sannolikt högre än machtalet 3
Roboten har krutmotor, som eventuellt skall
förses med "integrerat startsteg". Den är
uppdelad i fyra kroppssektioner, vilka
transporteras var för sig till fältförrådet. Vad roboten
väger är ej känt. Den består i sina huvuddelar
av noskon med zonrör, stridsdel med
kärnladdning, mittkropp med rörliga vingar i
korsmontering samt styrsystem och kraftförsörjning och
slutligen bakkropp med krutmotor och fyra
fasta, kryssmonterade (vridna 45° relativt
ving-korset) stabiliseringsfenor.
De fyra sektionerna transporteras fram till
operationsområdet i behållare, som är så
anordnade att varje sektion kan funktionsprovas
i transportläge på fordonen. Det kombinerade
transport- och lavettfordonet, fig. 2, är utrustat
för: funktionsprovning av robotens mittkropp
med styrsystemet, lastningshantering och
sammanfogning av roboten på lavetten,
terrängtransport av en komplett robot klargjord för
skott, klargöring av roboten, elevering och
inställning för skott, fininställning av
TN-syste-met i roboten på målkoordinaterna,
fjärrkontrolldon för slutkontroll och avfyring.
Robotfordonet har byggts på ett fyrhjulsdrivet
3 t chassi och kan flygtransporteras i ett
flertal typer av transportflygplan, t.ex. de
brittiska A. W. Argosy (660) och Short Belfast.
Markkalkylatorn är helautomatisk med
inbyggd funktionsprovapparat. Efter inmatning
av startplatsens och målets koordinater i
kalkylatorn, beräknar den inställningen av och
inställer styrsystemet med TN-plattformen. Den
senare inriktas med hjälp av en vid sidan av
robotfordonet uppställd teodolit.
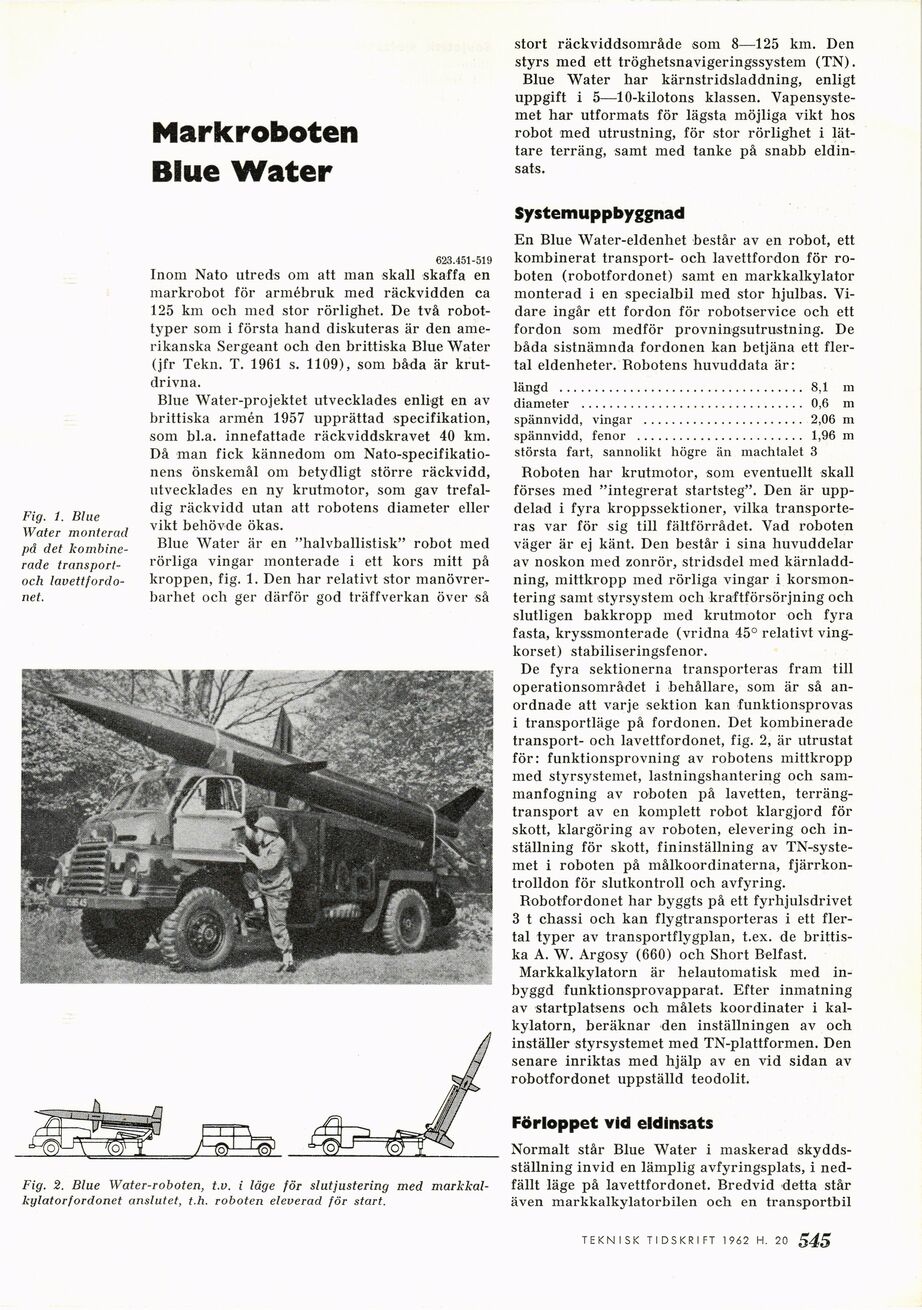
Fig. 1. Blue
Water monterad
pd det
kombinerade transport-och lavettfordonet.
623.451-519
Inom Nato utreds om att man skall skaffa en
markrobot för armébruk med räckvidden ca
125 km och med stor rörlighet. De två
robottyper som i första hand diskuteras är den
amerikanska Sergeant och den brittiska Blue Water
(jfr Tekn. T. 1961 s. 1109), som båda är
krut-drivna.
Blue Water-projektet utvecklades enligt en av
brittiska armén 1957 upprättad specifikation,
som bl.a. innefattade räckviddskravet 40 km.
Då man fick kännedom om
Nato-specifikationens önskemål om betydligt större räckvidd,
utvecklades en ny krutmotor, som gav
trefaldig räckvidd utan att robotens diameter eller
vikt behövde ökas.
Blue Water är en "halvballistisk" robot med
rörliga vingar monterade i ett kors mitt på
kroppen, fig. 1. Den har relativt stor
manövrer-barhet och ger därför god träffverkan över så
Förloppet vid eldinsats
Fig. 2. Blue Water-roboten, t.v. i läge för slutjustering med
markkal-kglatorfordonet anslutet, t.h. roboten eleverad för start.
Normalt står Blue Water i maskerad
skyddsställning invid en lämplig avfyringsplats, i
nedfällt läge på lavettfordonet. Bredvid detta står
även markkalkylatorbilen och en transportbil
TEKNISK TIDSKRIFT 1 962 H. 17 545
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}