
Full resolution (JPEG) - On this page / på denna sida - 1962, H. 27 - Agas tröghetsnavigeringssystem, av Rolf Ohlon
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Agas
tröghets-navigeringssystem
Referensfrekvins
Digital
avkännare
X*/Hdstiqhetsgyro
(inertiattmteran
de referens}
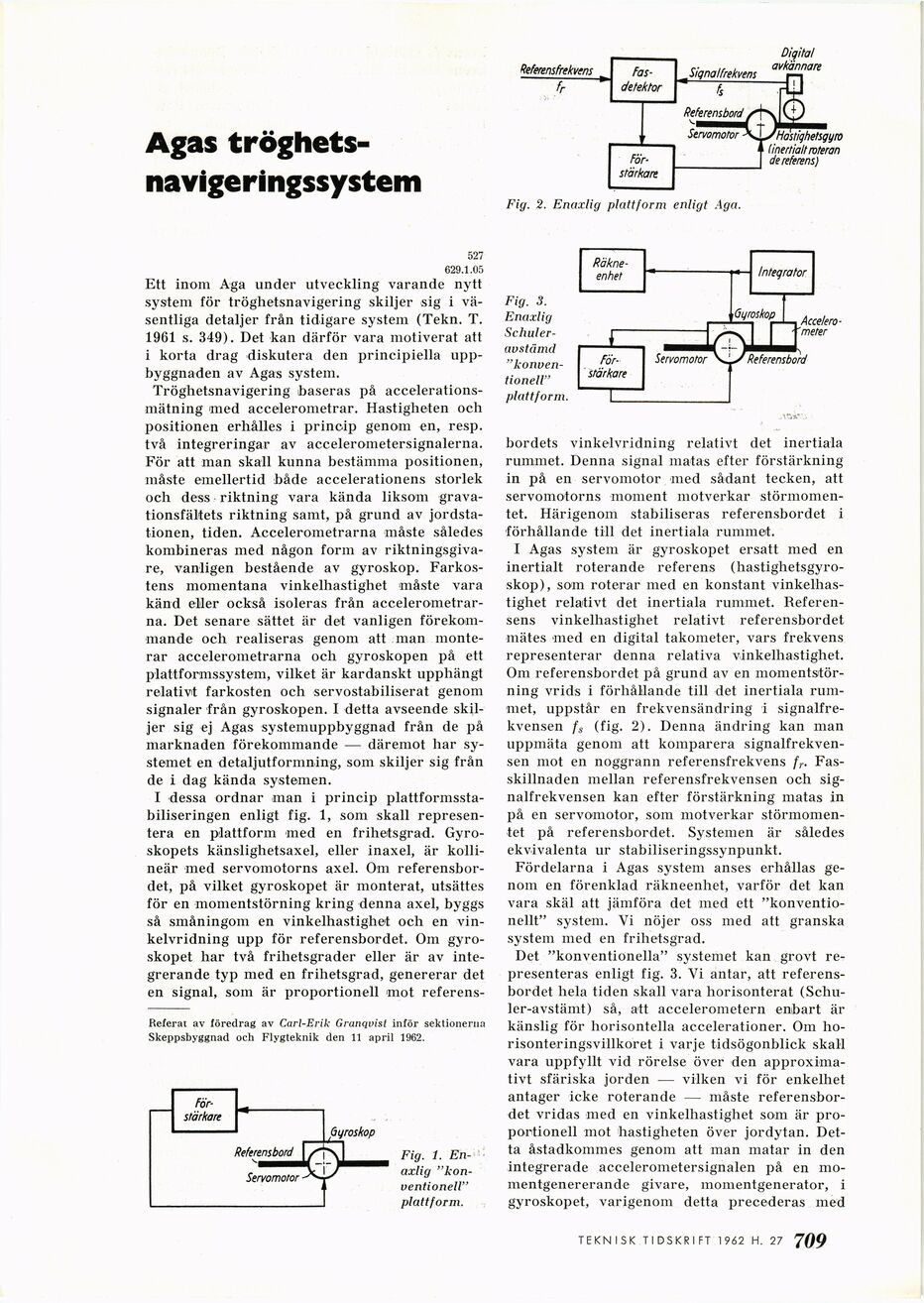
Enaxlig plattform enligt Aga.
527
629.1.05
Ett inom Aga under utveckling varande nytt
system för tröghetsnavigering skiljer sig i
väsentliga detaljer från tidigare system (Tekn. T.
1961 s. 349). Det kan därför vara motiverat att
i korta drag diskutera den principiella
uppbyggnaden av Agas system.
Tröghetsnavigering baseras på
accelerationsmätning med accelerometrar. Hastigheten och
positionen erhålles i princip genom en, resp.
två integreringar av accelerometersignalerna.
För att man skall kunna bestämma positionen,
måste emellertid både accelerationens storlek
och dess riktning vara kända liksom
grava-tionsfältets riktning samt, på grund av
jordstationen, tiden. Accelerometrarna måste således
kombineras med någon form av
riktningsgivare, vanligen bestående av gyroskop.
Farkostens momentana vinkelhastighet måste vara
känd eller också isoleras från
accelerometrarna. Det senare sättet är det vanligen
förekommande och realiseras genom att man
monterar accelerometrarna och gyroskopen på ett
plattformssystem, vilket är kardanskt upphängt
relativt farkosten och servostabiliserat genom
signaler från gyroskopen. I detta avseende
skiljer sig ej Agas systemuppbyggnad från de på
marknaden förekommande — däremot har
systemet en detaljutformning, som skiljer sig från
de i dag kända systemen.
I dessa ordnar man i princip
plattformsstabiliseringen enligt fig. 1, som skall
representera en plattform med en frihetsgrad.
Gyro-skopets känslighetsaxel, eller inaxel, är
kolli-neär med servomotorns axel. Om
referensbordet, på vilket gyroskopet är monterat, utsättes
för en momentstörning kring denna axel, byggs
så småningom en vinkelhastighet och en
vin-kelvridning upp för referensbordet. Om
gyroskopet har två frihetsgrader eller är av
integrerande typ med en frihetsgrad, genererar det
en signal, som är proportionell mot referens-
Fig. 3.
Enaxlig [-Sehuler-avstämd "konventionell"-]
{+Sehuler-
avstämd
"konven-
tionell"+}
plattform.
Referat av föredrag av Carl-Erik Granqvist inför sektionerna
Skeppsbyggnad och Flygteknik den 11 april 1962.
Fig. 1.
Enaxlig "konventionell"
plattform.
bordets vinkelvridning relativt det inertiala
rummet. Denna signal matas efter förstärkning
in på en servomotor med sådant tecken, att
servomotorns moment motverkar
störmomentet. Härigenom stabiliseras referensbordet i
förhållande till det inertiala rummet.
I Agas system är gyroskopet ersatt med en
inertialt roterande referens
(hastighetsgyro-skop), som roterar med en konstant
vinkelhastighet relativt det inertiala rummet.
Referensens vinkelhastighet relativt referensbordet
mätes med en digital takometer, vars frekvens
representerar denna relativa vinkelhastighet.
Om referensbordet på grund av en
momentstörning vrids i förhållande till det inertiala
rummet, uppstår en frekvensändring i
signalfrekvensen fs (fig. 2). Denna ändring kan man
uppmäta genom att komparera
signalfrekvensen mot en noggrann referensfrekvens fr.
Fasskillnaden mellan referensfrekvensen och
signalfrekvensen kan efter förstärkning matas in
på en servomotor, som motverkar
störmomentet på referensbordet. Systemen är således
ekvivalenta ur stabiliseringssynpunkt.
Fördelarna i Agas system anses erhållas
genom en förenklad räkneenhet, varför det kan
vara skäl att jämföra det med ett
"konventionellt" system. Vi nöjer oss med att granska
system med en frihetsgrad.
Det "konventionella" systemet kan grovt
representeras enligt fig. 3. Vi antar, att
referensbordet hela tiden skall vara horisonterat
(Schu-ler-avstämt) så, att accelerometern enbart är
känslig för horisontella accelerationer. Om
ho-risonteringsvillkoret i varje tidsögonblick skall
vara uppfyllt vid rörelse över den
approximativt sfäriska jorden — vilken vi för enkelhet
antager icke roterande — måste
referensbordet vridas med en vinkelhastighet som är
proportionell mot hastigheten över jordytan.
Detta åstadkommes genom att man matar in den
integrerade aecelerometersignalen på en
mo-mentgenererande givare, momentgenerator, i
gyroskopet, varigenom detta precederas med
teknisk tidskrift 1 962 h. 27 709
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}