
Full resolution (JPEG) - On this page / på denna sida - Sidor ...

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
146
TEKNISK TIDSKRIFT
20 SePt. 1930
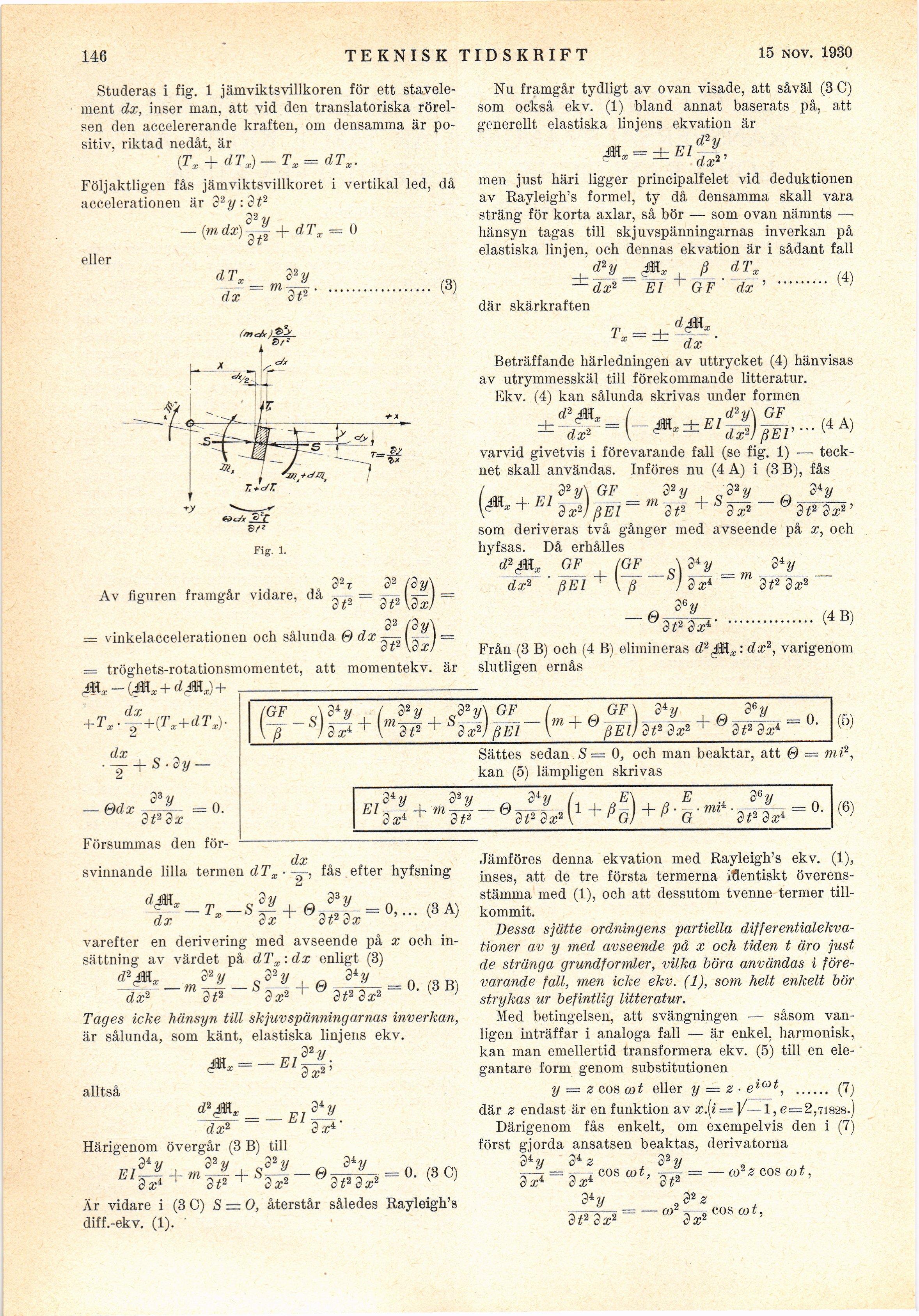
Studeras i fig. 1 jämviktsvillkoren för ett
stavele-ment dx, inser man, att vid den translatoriska
rörelsen den accelererande kraften, om densamma är
positiv, riktad nedåt, är
(Tx + dTx) - Tx = dTx.
Följaktligen fås jämviktsvillkoret i vertikal led, då
accelerationen är d2y:2t2
Nu framgår tydligt av ovan visade, att såväl (3 C)
som också ekv. (1) bland annat baserats på, att
generellt elastiska linjens ekvation är
,d2y
I x = ±El
dxs’
32 y
— (mdx)-d* + dTx
0
eller
dTx
dx
’’"dt2’
(3)
men just häri ligger principalfelet vid deduktionen
av Rayleigh’s formel, ty då densamma skall vara
sträng för korta axlar, så bör — som ovan nämnts —
hänsyn tagas till skjuvspänningarnas inverkan på
elastiska linjen, och dennas ekvation är i sådant fall
— dx2 El GF dx ’ ......... 1 ’
där skärkraften
Beträffande härledningen av uttrycket (4) hänvisas
av utrymmesskäl till förekommande litteratur.
Ekv. (4) kan sålunda skrivas under formen
dx2
El
Fig. 1.
’^^"’(if ) ßEl
varvid givetvis i förevarande fall (se fig. 1) —
tecknet skall användas. Införes nu (4 A) i (3 B), fås
/ d2y\ GF d2y d2y dly
(<* + E13^ßEi-mJ + sd-e wh’
som deriveras två gånger med avseende på x, och
hyfsas. Då erhålles
Av figuren framgår vidare, då
= vinkelaccelerationen och sålunda 0 dx -
ßy\ =
2t _
dt2 ~~ 3t2\dx)
32
dt2 Xdx)
= tröghets-rotationsmomentet, att momentekv. är
Mx-(M* + dMx)+
r] nr>
+ TX- 0 +(Tx+dTx).
d2jMx GF
dx* ’ ßEl 1 \ ß
(GF \ diy
It / a^ =
m
dt2 dx2
0
d«y
(4 B)
dt2’dx1’ ...........
Från (3 B) och (4 B) elimineras d’2ii\ c: dx2, varigenom
slutligen ernås
dx , C 1
— + s-dy —
— Ødx
d3y
0.
dt2dx
Försummas den för
GF
\dly I d2y J2y\ GF i _ GF \ 3ly
-s) d + (mé + ßEl -(m + 0ßEi) dt2 h + e
d«y
ßEl)dt2dx2 1 dt23xi
0.
(5)
Sättes sedan S= 0, och man beaktar, att 0 = mi2,
kan (5) lämpligen skrivas
El + m ~
3z4 T dt*
0
Vy
dt2dx2
i1+4)
+ß
E
G’
mr
dt2 3a;1
0.
(6)
dx
svinnande lilla termen d Tx ■ fås efter hyfsning
varefter en derivering med avseende på x och
insättning av värdet på dTx:dx enligt (3)
<P&X 3 2y 3 2y 3 *y _
~dx*+ ° Wdtf - B)
Tages icke hänsyn till skjuvspänningarnas inverkan,
är sålunda, som känt, elastiska linjens ekv.
Mx = — El
3 2y
alltså
dx2
El
Vy
dx*’
Härigenom övergår (3 B) till
dxi 1 312
Är vidare i (3 C) S :
diff.-ekv. (1). ’
0
Vy
= 0. (3 C)
dt2dx2
O, återstår således Rayleigh’s
Jämföres denna ekvation med Rayleigh’s ekv. (1),
inses, att de tre första termerna identiskt
överensstämma med (1), och att dessutom tvenne termer
tillkommit.
Dessa sjätte ordningens partiella
differentialekvationer av y med avseende på x och tiden t äro just
de stränga grundformler, vilka böra användas i
förevarande fall, men icke ekv. (1), som helt enkelt bör
strykas ur befintlig litteratur.
Med betingelsen, att svängningen — såsom
vanligen inträffar i analoga fall — är enkel, harmonisk,
kan man emellertid transformera ekv. (5) till en
elegantare form genom Substitutionen
y = z eos mt eller y — z ■ eicot, ...... (7j
där z endast är en funktion av £.(« = ]/ - l,e=2,71828.)
Därigenom fås enkelt, om exempelvis den i (7)
först gjorda ansatsen beaktas, derivatorna
3iy 34 z n d2y
dx*
eos mt, == — co2z eos cot,
3*y d2 z
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}