
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
20 sept. 1930
MEKANIK
109
För k = 0 får detta uttryck ett obestämt värde,
som dock genom differentiering kan bestämmas till
ß* = 9 _
fi Gi -f- 6?2
Ett annat förhållande, som i föreliggande fall
1 — eos ßt
blir obestämt är
k
traktande, att detta kan utvecklas i serien
2 k
t.
6 k
+
för erhåller man för k = 0
k’
■ eos ßt
ff
t\
k 2 (Gi + Øa)
Sammanställer man dessa olika resultat, erhålles
slutligen som uttryck för den andra stora parentesen
i ekv. (21)
9
-t2
G* I
j (1 — eos yt).
2 (Gl + G2) ’ (Gi + G2f
För ,sL kan sålunda följande ekvation uppställas
Q_Q
2 _ Gi + G2 ’
l
Sh = vt-
G2
Gi+ G2
fi
+1
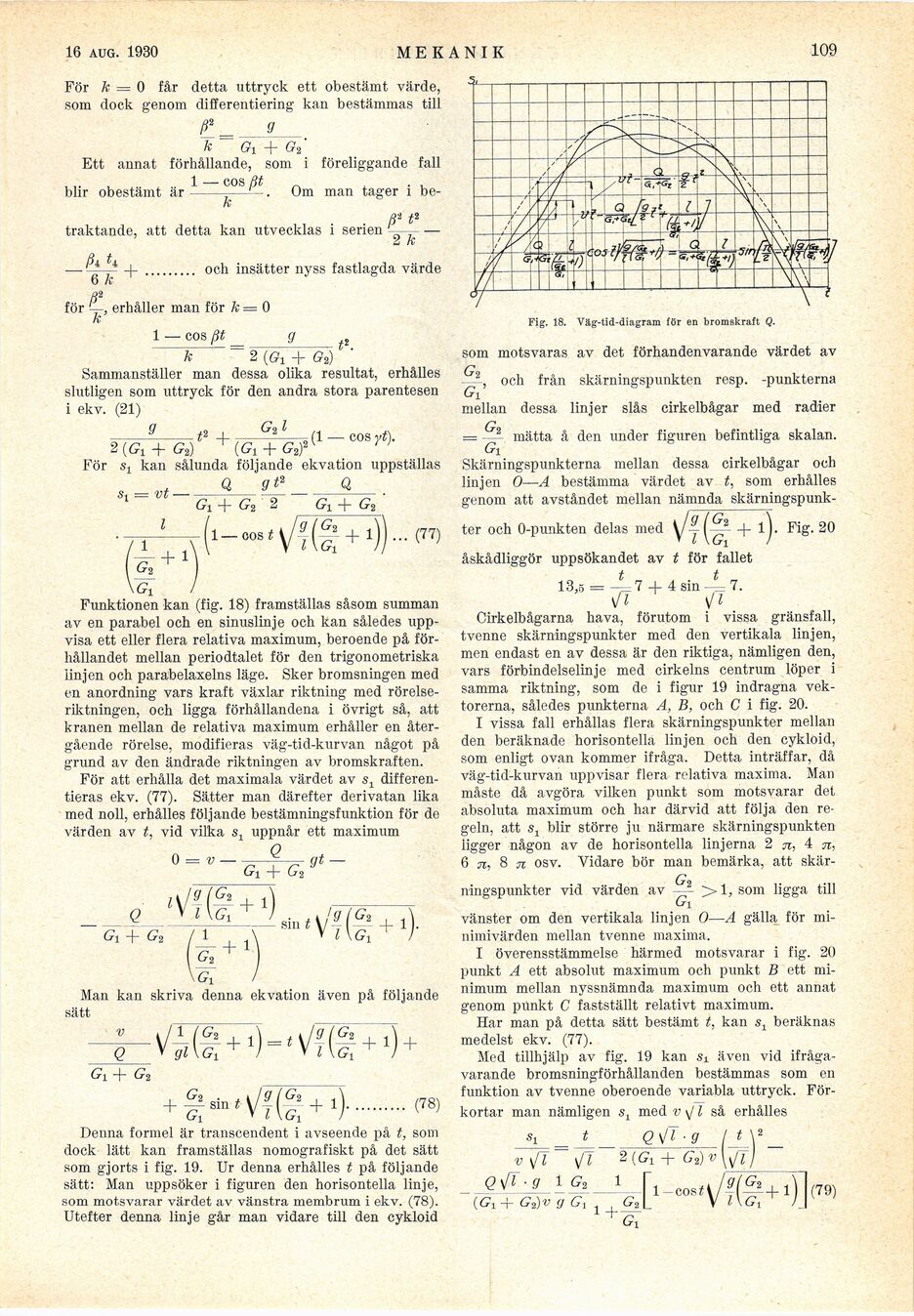
Funktionen kan (fig. 18) framställas såsom summan
av en parabel och en sinuslinje och kan således
uppvisa ett eller flera relativa maximum, beroende på
förhållandet mellan periodtalet för den trigonometriska
linjen och parabelaxelns läge. Sker bromsningen med
en anordning vars kraft växlar riktning med
rörelseriktningen, och ligga förhållandena i övrigt så, att
kranen mellan de relativa maximum erhåller en
återgående rörelse, modifieras väg-tid-kurvan något på
grund av den ändrade riktningen av bromskraften.
För att erhålla det maximala värdet av s1
differentieras ekv. (77). Sätter man därefter derivatan lika
med noll, erhålles följande bestämningsfunktion för de
värden av t, vid vilka s1
0 = v ■
uppnår ett maximum
Q
Gi + G,
gt
Q
Gi + Gi
V
Gi
+ 1
sin t
v’!
G2
Gi
Man kan skriva denna ekvation även på följande
sätt
<?2
ffl\Gi
+ 1
\/?(t + >)
+
Gt+ G2
+
sin t
ti
+ 1
(78)
G2
GI" V l ICj
Denna formel är transcendent i avseende på t, som
dock lätt kan framställas nomografiskt på det sätt
som gjorts i fig. 19. Ur denna erhålles t på följande
sätt: Man uppsöker i figuren den horisontella linje,
som motsvarar värdet av vänstra membrum i ekv. (78).
Utefter denna linje går man vidare till den cykloid
Om man tager i
be-ß2 P
och insätter nyss fastlagda värde
Fig. 18. Väg-tid-diagram för en bromskraft Q.
som motsvaras av det förhandenvarande värdet av
Q
2, och från skärningspunkten resp. -punkterna
Gi
mellan dessa linjer slås cirkelbågar med radier
= mätta å den under figuren befintliga skalan.
Gi
Skärningspunkterna mellan dessa cirkelbågar och
linjen O—A bestämma värdet av t, som erhålles
genom att avståndet mellan nämnda skärningspunk-
ter och O-punkten delas med
Fig. 20
åskådliggör uppsökandet av t för fallet
t t
13,5 = — 7 + 4 sin — 7.
\/l \/l
Cirkelbågarna hava, förutom i vissa gränsfall,
tvenne skärningspunkter med den vertikala linjen,
men endast en av dessa är den riktiga, nämligen den,
vars förbindelselinje med cirkelns centrum löper i
samma riktning, som de i figur 19 indragna
vektorerna, således punkterna A, B, och C i fig. 20.
I vissa fall erhållas flera skärningspunkter mellan
den beräknade horisontella linjen och den cykloid,
som enligt ovan kommer ifråga, Detta inträffar, då
väg-tid-kurvan uppvisar flera relativa maxima. Man
måste då avgöra vilken punkt som motsvarar det
absoluta maximum och har därvid att följa den
regeln, att Sj blir större ju närmare skärningspunkten
ligger någon av de horisontella linjerna 2 n, 4 n,
6 ti, 8 n osv. Vidare bör man bemärka, att skär-
Ch
Gi
vänster om den vertikala linjen O—A gälla för
mi-nimivärden mellan tvenne maxima,
I överensstämmelse härmed motsvarar i fig. 20
punkt A ett absolut maximum och punkt B ett
minimum mellan nyssnämnda maximum och ett annat
genom punkt C fastställt relativt maximum.
Har man på detta sätt bestämt t, kan Sj beräknas
medelst ekv. (77).
Med tillhjälp av fig. 19 kan s± även vid
ifrågavarande bromsningförhållanden bestämmas som en
funktion av tvenne oberoende variabla uttryck.
Förkortar man nämligen sL med v \J l så erhålles
si = ± _ Qsß-g [J
v fi s/J 2 (Gi + G2)v\^\
Qsfi g l g2 l r
(&\ + G2)v g Gs 1 , Gz I
Gi
ningspunkter vid värden av -A >1, som ligga till
-cos£
m
+i
(79)
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}