
Full resolution (JPEG) - On this page / på denna sida - 1962, H. 36 - Stril 60, av Olof Hörberg
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Stril 60
Civilingenjör Olof Hörberg, Stockholm
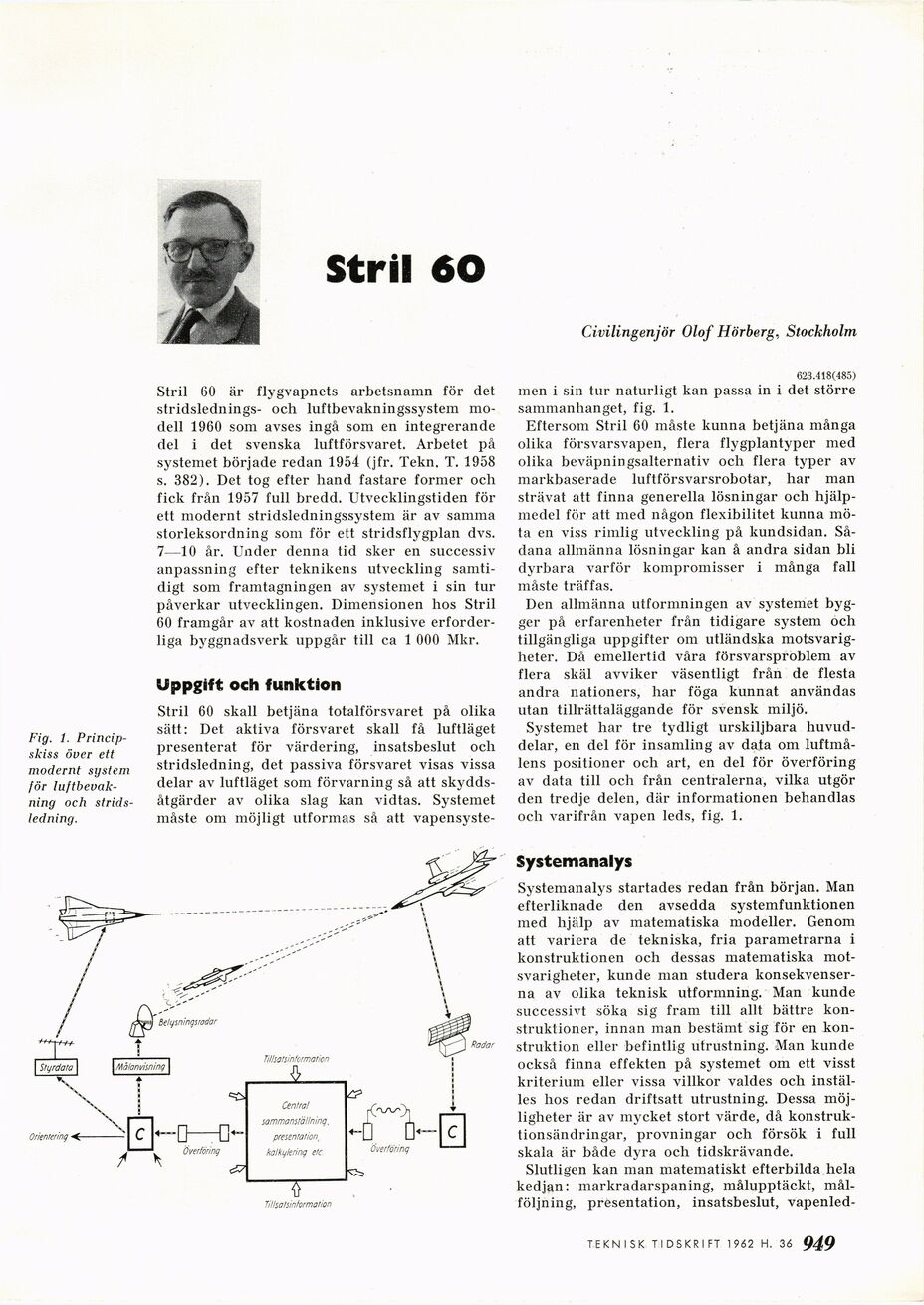
Fig. 1.
Principskiss över ett
modernt system
för
luftbevakning och
stridsledning.
Stril 60 är flygvapnets arbetsnamn för det
stridslednings- och luftbevakningssystem
modell 1960 som avses ingå som en integrerande
del i det svenska luftförsvaret. Arbetet på
systemet började redan 1954 (jfr. Tekn. T. 1958
s. 382). Det tog efter hand fastare former och
fick från 1957 full bredd. Utvecklingstiden för
ett modernt stridsledningssystem är av samma
storleksordning som för ett stridsflygplan dvs.
7—10 år. Under denna tid sker en successiv
anpassning efter teknikens utveckling
samtidigt som framtagningen av systemet i sin tur
påverkar utvecklingen. Dimensionen hos Stril
60 framgår av att kostnaden inklusive
erforderliga byggnadsverk uppgår till ca 1 000 Mkr.
Uppgift och funktion
Stril 60 skall betjäna totalförsvaret på olika
sätt: Det aktiva försvaret skall få luftläget
presenterat för värdering, insatsbeslut och
stridsledning, det passiva försvaret visas vissa
delar av luftläget som förvarning så att
skyddsåtgärder av olika slag kan vidtas. Systemet
måste om möjligt utformas så att vapensyste-
623.418(485)
men i sin tur naturligt kan passa in i det större
sammanhanget, fig. 1.
Eftersom Stril 60 måste kunna betjäna många
olika försvarsvapen, flera flygplantyper med
olika beväpningsalternativ och flera typer av
markbaserade luftförsvarsrobotar, har man
strävat att finna generella lösningar och
hjälpmedel för att med någon flexibilitet kunna
möta en viss rimlig utveckling på kundsidan.
Sådana allmänna lösningar kan å andra sidan bli
dyrbara varför kompromisser i många fall
måste träffas.
Den allmänna utformningen av systemet
bygger på erfarenheter från tidigare system och
tillgängliga uppgifter om utländska
motsvarigheter. Då emellertid våra försvarsproblem av
flera skäl avviker väsentligt från de flesta
andra nationers, har föga kunnat användas
utan tillrättaläggande för svensk miljö.
Systemet har tre tydligt urskiljbara
huvuddelar, en del för insamling av data om
luftmålens positioner och art, en del för överföring
av data till och från centralerna, vilka utgör
den tredje delen, där informationen behandlas
och varifrån vapen leds, fig. 1.
Orientering
w
Tillsatsinformation
Systemanalys
Systemanalys startades redan från början. Man
efterliknade den avsedda systemfunktionen
med hjälp av matematiska modeller. Genom
att variera de tekniska, fria parametrarna i
konstruktionen och dessas matematiska
motsvarigheter, kunde man studera
konsekvenserna av olika teknisk utformning. Man kunde
successivt söka sig fram till allt bättre
konstruktioner, innan man bestämt sig för en
konstruktion eller befintlig utrustning. Man kunde
också finna effekten på systemet om ett visst
kriterium eller vissa villkor valdes och
inställes hos redan driftsätt utrustning. Dessa
möjligheter är av mycket stort värde, då
konstruktionsändringar, provningar och försök i full
skala är både dyra och tidskrävande.
Slutligen kan man matematiskt efterbilda hela
kedjan: markradarspaning, målupptäckt,
mål-följning, presentation, insatsbeslut, vapenled-
TEKNISK TIDSKRIFT 1 962 H. 34 949
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}