
Full resolution (JPEG) - On this page / på denna sida - No. 11. 22. april 1924 - Sider ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
D=m• Ei • Im • cos yj
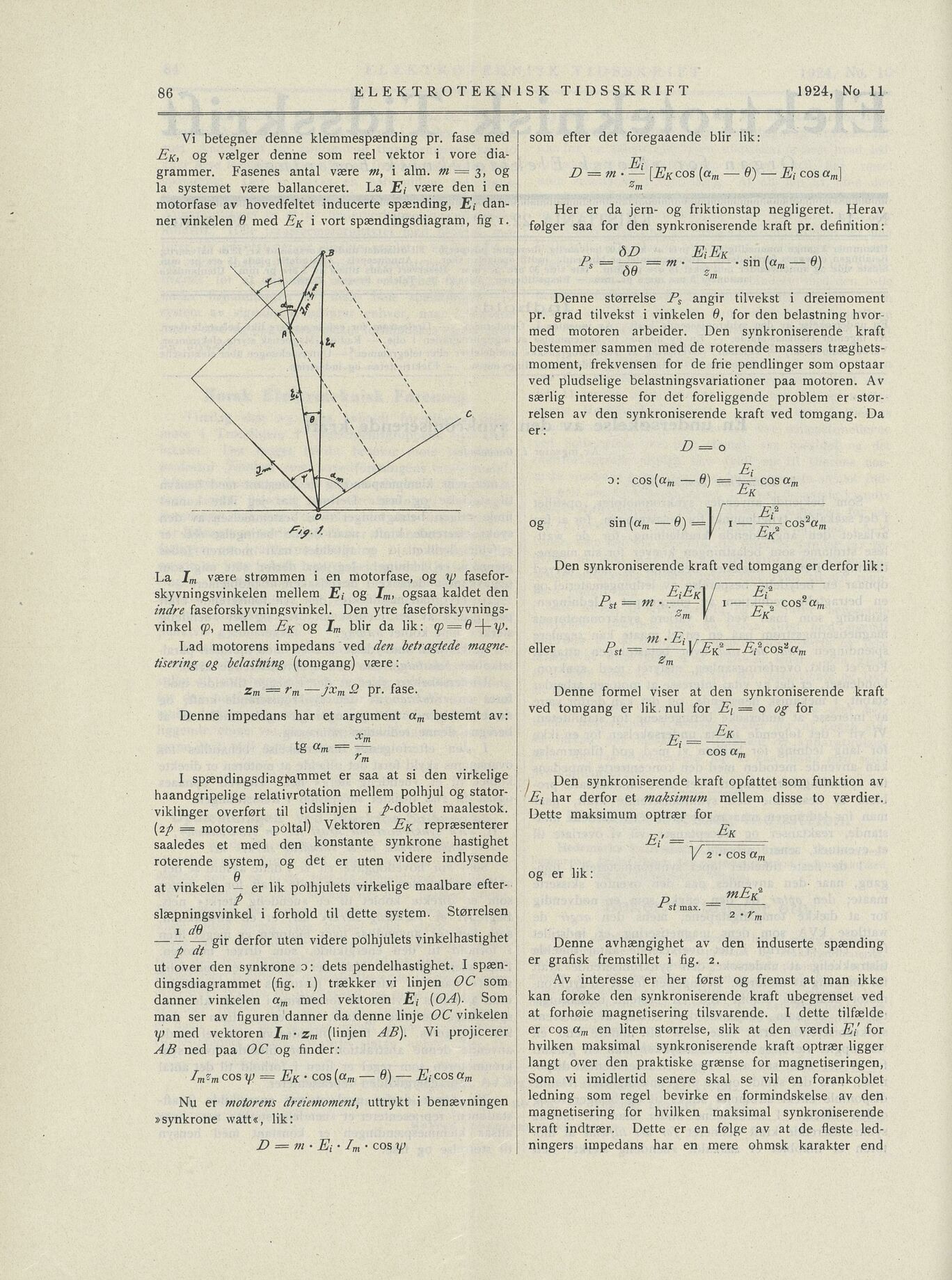
Imzm cos yj1 = Ek‘ cos [am —6)— Ei cos am
_ mEE
E st max.
2 -rm
-p / Ek
2 • cos am
. xm
tg «m = —
rm
Et = ——
COS ccm
EiEAj Ei2
Pst = m E’YErs—Ei‘^am
Zm
Ei
o: cos(am —0)=^-cosam
Ek
1 —^Vcos2am
E = o
ÖD EiEk . f m
Fs = —=m- —— • sin [am —6)
Ei
D= m [Ek oos (am —6)— Ei cos am]
ELEKTROTEKNISK TIDSSKRIFT 1924, No 11
Vi betegner denne klemmespænding pr. fase med
Ek, og vælger denne som reel vektor i vore dia
grammer. Fasenes antal være m, i alm. m— 3, og
la systemet være ballanceret. La Ei være den i en
motorfase av hovedfeltet inducerte spænding, Ei dan
ner vinkelen 6 med Ek i vort spændingsdiagram, fig 1.
Her er da jern- og friktionstap negligeret. Herav
følger saa for den synkroniserende kraft pr. definition:
Denne størrelse Ps angir tilvekst i dreiemoment
pr. grad tilvekst i vinkelen 6, for den belastning hvor
med motoren arbeider. Den synkroniserende kraft
bestemmer sammen med de roterende massers træghets
moment, frekvensen for de frie pendlinger som opstaar
ved pludselige belastningsvariationer paa motoren. Av
særlig interesse for det foreliggende problem er stør
relsen av den synkroniserende kraft ved tomgang. Da
er;
Den synkroniserende kraft ved tomgang er derfor lik;
La Im være strømmen i en motorfase, og y fasefor
skyvningsvinkelen mellem Ei og Im , ogsaa kaldet den
indre faseforskyvningsvinkel. Den ytre faseforskyvnings
vinkel 99, mellem Ek og Im blir da lik; op = 6 -\-y).
Lad motorens impedans ved den betragtede magne
tisering og belastning (tomgang) være:
Denne formel viser at den synkroniserende kraft
ved tomgang er lik nul for Ei — o og for
I spændingsdiagtammet er saa at si den virkelige
haandgripelige relativr°tab°n mellem polhjul og stator
viklinger overført til tidslinjen i maalestok.
(2p = motorens poltal) Vektoren EK repræsenterer
saaledes et med den konstante synkrone hastighet
roterende system, og det er uten videre indlysende
Q
at vinkelen — er lik polhjulets virkelige maalbare efter-
P
slæpningsvinkel i forhold til dette system. Størrelsen
— — gir derfor uten videre polhjulets vinkelhastighet
p dt
ut over den synkrone o: dets pendelhastighet. I spæn
dingsdiagrammet (fig. 1) trækker vi linjen OC som
danner vinkelen ctm med vektoren Ei ( OA). Som
man ser av figuren danner da denne linje OC vinkelen
yj med vektoren Im •zm (linjen AB). Vi projicerer
AB ned paa OC og finder:
Den synkroniserende kraft opfattet som funktion av
Ei har derfor et maksimum mellem disse to værdier.
Dette maksimum optrær for
Denne avhængighet av den induserte spænding
er grafisk fremstillet i fig. 2.
Av interesse er her først og fremst at man ikke
kan forøke den synkroniserende kraft ubegrenset ved
at forhøie magnetisering tilsvarende. I dette tilfælde
er cos am en liten størrelse, slik at den værdi E{ for
hvilken maksimal synkroniserende kraft optrær ligger
langt over den praktiske grænse for magnetiseringen,
Som vi imidlertid senere skal se vil en forankoblet
ledning som regel bevirke en formindskelse av den
magnetisering for hvilken maksimal synkroniserende
kraft indtrær. Dette er en følge av at de fleste led
ningers impedans har en mere ohmsk karakter end
Nu er motorens dreiemoment, uttrykt i benævningen
»synkrone \vatt«, lik:
og er lik:
Denne impedans har et argument am bestemt av:
zm =rm —jxm 2 pr. fase.
som efter det foregaaende blir lik:
86
\ Vi \ V^
o
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}