
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
368
INDUSTRI TID NINGEN NORDEN
Akustisk vattendjupmätare.
Det har förut föreslagits, heter det i beskrivning-en
över sv. patentet nr 57689, att utföra lödningar genom
att alstra ett ljud och därefter lyssna till ekot därav
och iakttaga den tid, det tager för ljudet att gå vertikalt
till havsbottnen och tillbaka vertikalt till
avlyssningsapparaten. En dylik metod förutsätter mycket
noggrann tidmätning, särskilt för lödningar i grunt vatten,
på grund av den korta tid, som fordras för ljudet att gå
fram och tillbaka. Dessutom fordrar denna metod en
ömtålig apparat, komplicerad och svår att sköta.
Ifrågavarande patent avser en uppfinning av [-lif].-] {+li-
f].+} Hayes, som med densamma avser att göra lödningen
ej beroende av tidmätning, utan bestämmes
vattendjupet genom uppmätning enligt den binaurala metoden av
den vinkel, under vilken ljudet reflekteras.
Vid bestämmandet av vattendjupet alstras ett ljud,
t. ex. larmet från en fartygspropeller eller en
under-vattensklocka eller oscillator. Vid en annan station på
känt avstånd från ljudkällan är anbragt en
ljudmottag-ningsapparat anordnad för bestämning enligt den
binaurala metoden av det mottagna ljudets riktning
och bestående av en av flera enheter sammansatt
hy-drofon försedd med en graderad kompensator.
Ljudet från ljudkällan träffar havsbottnen och
reflekteras, varvid reflexionsvinkeln är lika med
infallsvinkeln enligt lagarna för reflexion. Om man känner
det horisontala avståndet mellan
judavsändare-och mottagningsstationerna och det reflekterade ljudets
vinkel med mottagningsstationen, kan vattnets vertikala
djup beräknas. Eller om man känner vattendjupet och
det reflekterade ljudets vinkel, kan det horisontala
avståndet till ljudkällan beräknas.
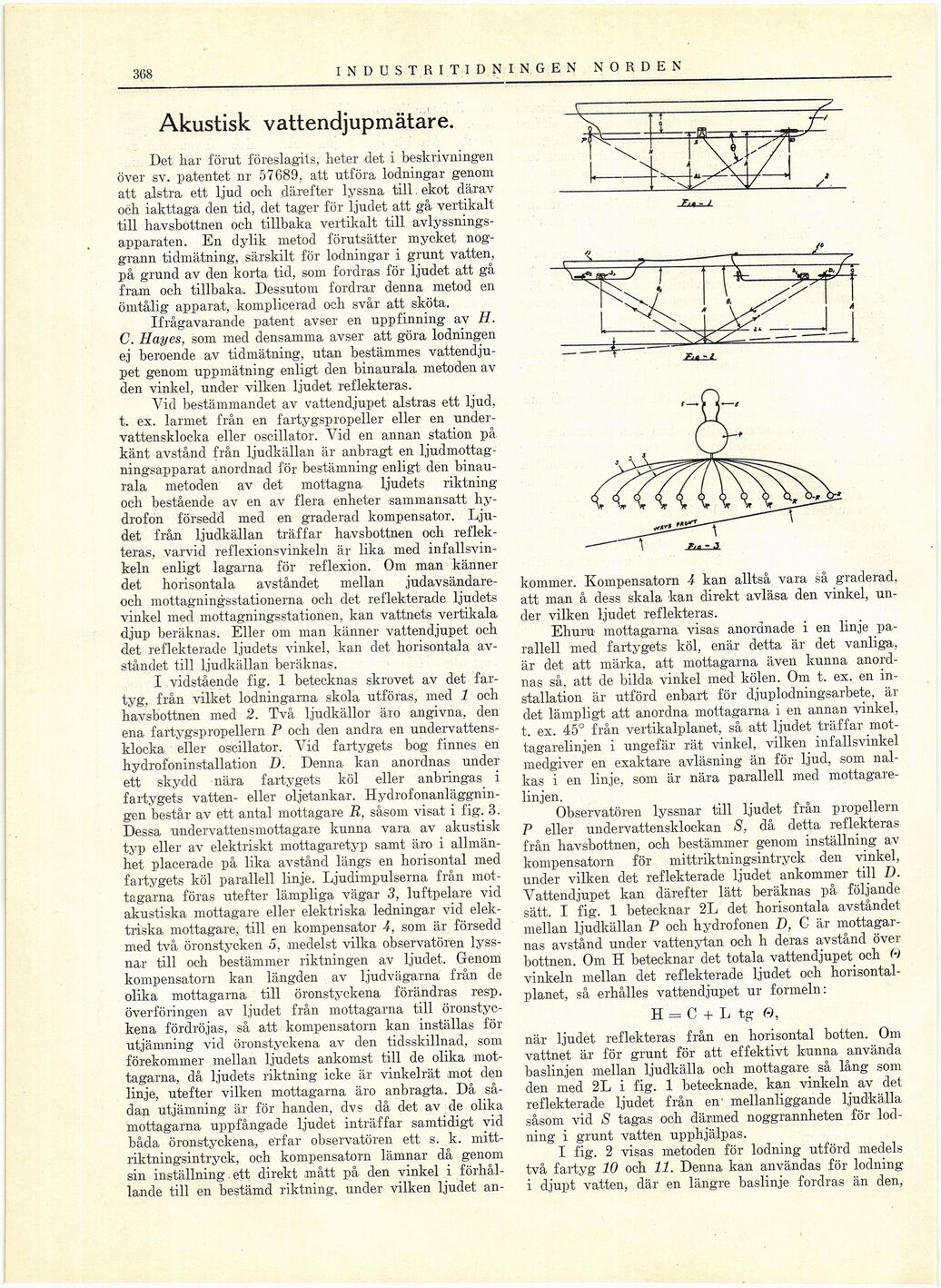
I vidstående fig. 1 betecknas skrovet av det
fartyg, från vilket lödningarna skola utföras, med 1 och
havsbottnen med 2. Två ljudkällor äro angivna, den
ena fartygspropellern P och den andra en
undervattens-klocka eller oscillator. Vid fartygets bog finnes en
hydrofoninstallation D. Denna kan anordnas under
ett skydd nära fartygets köl eller anbringas i
fartygets vatten- eller oljetankar.
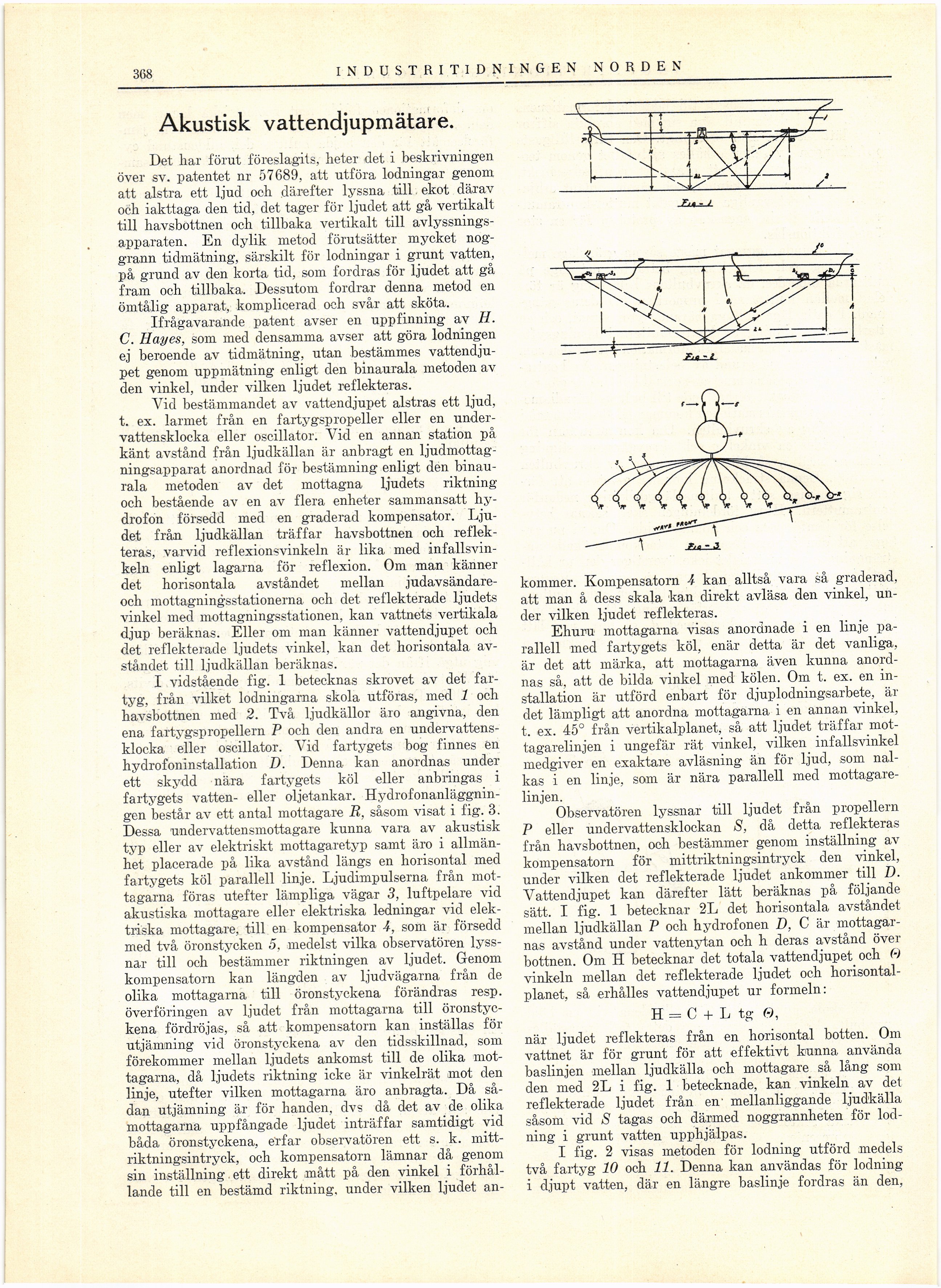
Hydrofonanläggnin-gen består av ett antal mottagare R, såsom visat i fig. 3.
Dessa undervattensmottagare kunna vara av akustisk
typ eller av elektriskt mottagaretyp samt äro i
allmänhet placerade på lika avstånd längs en horisontal med
fartygets köl parallell linje. Ljudimpulserna från
mottagarna föras utefter lämpliga vägar 3, luftpelare vid
akustiska mottagare eller elektriska ledningar vid
elektriska mottagare, till en kompensator 4, som är försedd
med två öronstycken 5, medelst vilka observatören
lyssnar till och bestämmer riktningen av ljudet. Genom
kompensatorn kan längden av ljudvägarna från de
olika mottagarna till öronstyckena förändras resp.
överföringen av ljudet från mottagarna till
öronstyckena fördröjas, så att kompensatorn kan inställas för
utjämning vid öronstyckena av den tidsskillnad, som
förekommer mellan ljudets ankomst till de olika
mottagarna, då ljudets riktning icke är vinkelrät mot den
linje, utefter vilken mottagarna äro anbragta. Då
sådan utjämning är för handen, dvs då det av de olika
mottagarna uppfångade ljudet inträffar samtidigt vid
båda öronstyckena, etfar observatören ett s. k.
mitt-riktningsintryck, och kompensatorn lämnar då genom
sin inställning. ett direkt mått på den vinkel i
förhållande till en bestämd riktning, under vilken ljudet an-
r,*-/
-l
kommer. Kompensatorn 4 kan alltså vara så graderad,
att man å dess skala kan direkt avläsa den vinkel,
under vilken ljudet reflekteras.
Ehuru mottagarna visas anordnade i en linje
parallell med fartygets köl, enär detta är det vanliga,
är det att märka, att mottagarna även kunna
anordnas så, att de bilda vinkel med kölen. Om t. ex. en
installation är utförd enbart för djuplodningsarbete, är
det lämpligt att anordna mottagarna i en annan vinkel,
t. ex. 45° från vertikalplanet, så att ljudet träffar
mottagarelinjen i ungefär rät vinkel, vilken infallsvinkel
medgiver en exaktare avläsning än för ljud, som
nalkas i en linje, som är nära parallell med
mottagare-linjen.
Observatören lyssnar till ljudet från propellern
P eller undervattensklockan S, då detta reflekteras
från havsbottnen, och bestämmer genom inställning av
kompensatorn för mittriktningsintryck den vinkel,
under vilken det reflekterade ljudet ankommer till I).
Vattendjupet kan därefter lätt beräknas på följande
sätt. I fig. 1 betecknar 2L det horisontala avståndet
mellan ljudkällan P och hydrofonen D, C är
mottagarnas avstånd under vattenytan och h deras avstånd över
bottnen. Om H betecknar det totala vattendjupet och (•)
vinkeln mellan det reflekterade ljudet och
horisontalplanet, så erhålles vattendjupet ur formeln:
H = C + L tg (■),
när ljudet reflekteras från en horisontal botten. Om
vattnet är för grunt för att effektivt kunna använda
baslinjen mellan ljudkälla och mottagare så lång som
den med 2L i fig. 1 betecknade, kan vinkeln av det
reflekterade ljudet från en’ mellanliggande ljudkälla
såsom vid S tagas och därmed noggrannheten för
lödning i grunt vatten upphjälpas.
I fig. 2 visas metoden för lödning utförd medels
två fartyg 10 och 11. Denna kan användas för lödning
i djupt vatten, där en längre baslinje fordras än den,
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}