
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
-106
TEKNISK TIDSKRIFT
1 febr. 1930
hade en period motsvarande det naturliga
svängningstalet av den motor, som använts för
experimenten.
Om axelbelastningen är noll övergår ekv. (11) till:
Pacc + P,i d® + Ps^ Sin 0 = 0 ... (23)
Vid bestämning av svängningsperioden kommer 0 att
variera inom mycket trånga gränser och således kan
ekv. (23) skrivas
<P& d O _ „
p~-ör + p*-ü + p.e = o-
Detta är en linjär andragradsdifferentialekvation.
som lätt kan lösas och har rötterna:
P*
V = —
2 P„
:1
T 1 acc
P 2
Pd
4 P
’ acc
Emedan rotorn vid tomgång kommer att hava nära
synkron hastighet, är det tydligt att den reella termen
och andra termen under rotmärket kunna försummas,
och vi hava:
Ø = kte
+ j
= k3 sin
således är perioden
m^M
’V
Pi
Pacc.
t
t + a
(24)
I detta fall användes en kalibreringslinje på
effekt-vinkelkurvbladet. Denna linje hade en sådan
lutning, att 10 kW motsvarade 90 el. grader, och då
Pacc enligt förut är 0,0045 erhålles:
T = 2 n VÆ?15 = 1)26 sekunder.
V / 90–
Skalan för vinkeln i horisontell led för
effekt-vinkel-kurvan valdes lika som den för vinkeln i vertikal led å
resultatbrädet, och tidsskalan för resultatkurvan
valdes så, att synkroniseringsförloppet under ca 3 sek.
efter omkopplingen kunde erhållas.
Sedan dessa båda skalor bestämts, erhölls skalan
för effekt-eftersläpningskurvan på följande sätt.
Sedan på den mekaniska integreringsanordningen den
horisontella skivan bragts att göra kontakt i
mittpunkten av den vertikala (dvs. var nu stillastående),
stannades motorn, som manövrerade den senare, och
dessutom frånkopplades Wh-mätaren.
Çbj-v.
\frjhz<H SL
/–-~Sc|oy Q1
[-Integrations-skiva-]
{+Integrations-
skiva+}
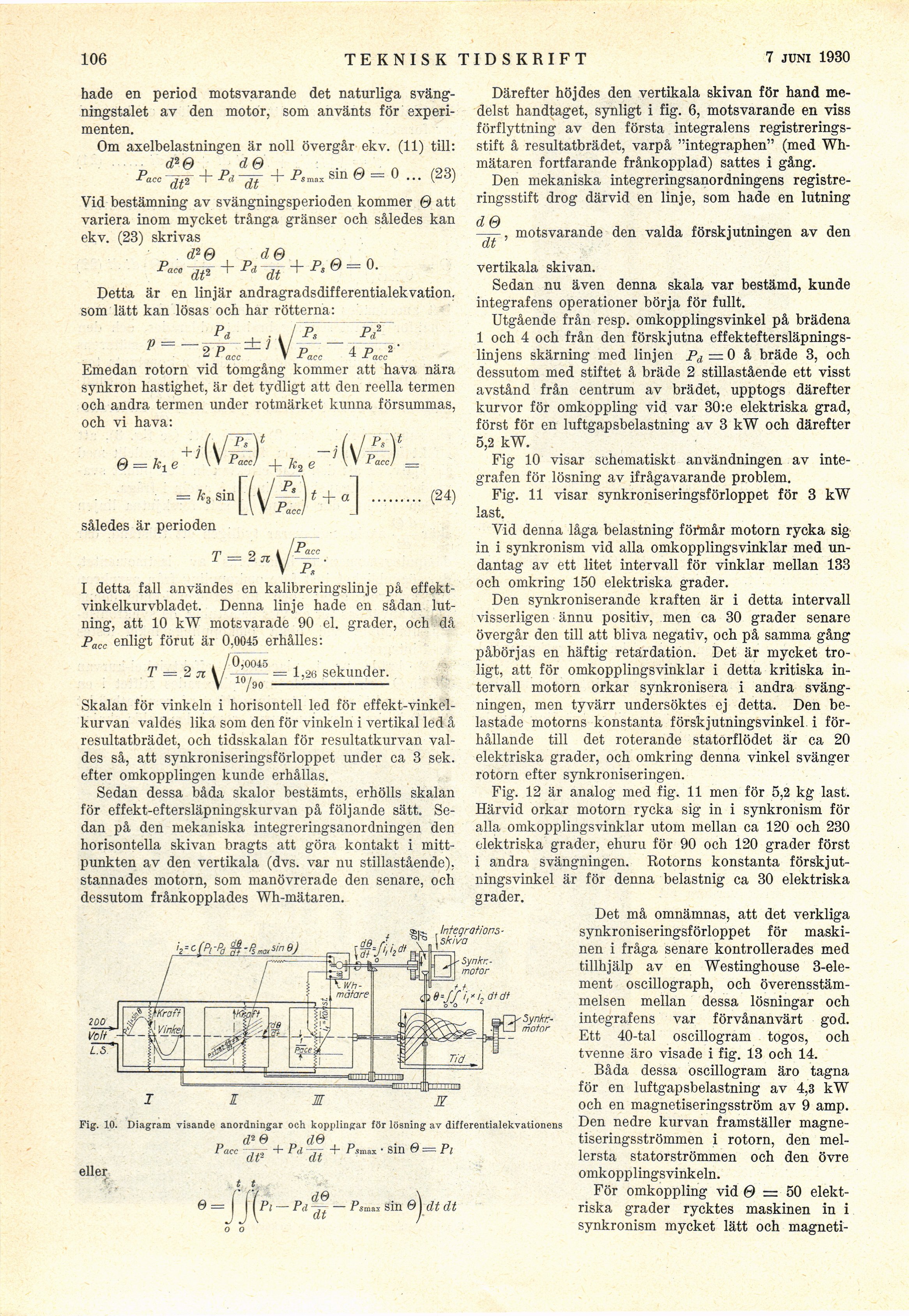
Fig. 10. Diagram visande anordningar och kopplingar för lösning av differentialekvationens
rn ft rif)
sin e — Pi
eller
Pacc , ,„–h Pd ,, + Psmax ’
dt2 dt
t t
-jjl
Pi — Pd -j^ — Psmai sin Q j dt dt
Därefter höjdes den vertikala skivan för hand
medelst handtaget, synligt i fig. 6, motsvarande en viss
förflyttning av den första integralens
registreringsstift å resultatbrädet, varpå "integraphen" (med
Wh-mätaren fortfarande frånkopplad) sattes i gång.
Den mekaniska integreringsanordningens
registreringsstift drog därvid en linje, som hade en lutning
motsvarande den valda förskjutningen av den
at
vertikala skivan.
Sedan nu även denna skala var bestämd, kunde
integrafens operationer börja för fullt.
Utgående från resp. omkopplingsvinkel på brädena
1 och 4 och från den förskjutna
effekteftersläpnings-linjens skärning med linjen pd — 0 å bräde 3, och
dessutom med stiftet å bräde 2 stillastående ett visst
avstånd från centrum av brädet, upptogs därefter
kurvor för omkoppling vid var 30 :e elektriska grad,
först för en luftgapsbelastning av 3 kW och därefter
5,2 kW.
Fig 10 visar schematiskt användningen av
inte-grafen för lösning av ifrågavarande problem.
Fig. 11 visar synkroniseringsförloppet för 3 kW
last.
Vid denna låga belastning förmår motorn rycka sig
in i synkronism vid alla omkopplingsvinklar med
undantag av ett litet intervall för vinklar mellan 133
och omkring 150 elektriska grader.
Den synkroniserande kraften är i detta intervall
visserligen ännu positiv, men ca 30 grader senare
övergår den till att bliva negativ, och på samma gång
påbörjas en häftig retardation. Det är mycket
troligt, att för omkopplingsvinklar i detta kritiska
intervall motorn orkar synkronisera i andra
svängningen, men tyvärr undersöktes ej detta. Den
belastade motorns konstanta förskjutningsvinkel. i
förhållande till det roterande statorflödet är ca 20
elektriska grader, och omkring denna vinkel svänger
rotorn efter synkroniseringen.
Fig. 12 är analog med fig. 11 men för 5,2 kg last.
Härvid orkar motorn rycka sig in i synkronism för
alla omkopplingsvinklar utom mellan ca 120 och 230
elektriska grader, ehuru för 90 och 120 grader först
i andra svängningen. Rotorns konstanta
förskjutningsvinkel är för denna belastnig ca 30 elektriska
grader.
Det må omnämnas, att det verkliga
synkroniseringsförloppet för
maskinen i fråga senare kontrollerades med
tillhjälp av en Westinghouse
3-ele-ment oscillograph, och
överensstämmelsen mellan dessa lösningar och
integrafens var förvånanvärt god.
Ett 40-tal oscillogram togos, och
tvenne äro visade i fig. 13 och 14.
Båda dessa oscillogram äro tagna
för en luftgapsbelastning av 4,3 kW
och en magnetiseringsström av 9 amp.
Den nedre kurvan framställer
magne-tiseringsströmmen i rotorn, den
mellersta statorströmmen och den övre
omkopplingsvinkeln.
För omkoppling vid O — 50
elektriska grader rycktes maskinen in i
synkronism mycket lätt och magneti-
Bg-Syrjfer-
motor
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}