
Full resolution (JPEG) - On this page / på denna sida - Häfte 17. 29 april 1939 - Åtgärder för ökad tåghastighet samt nya snälltågselektrolok vid S. J., av H. Bager och J. Ottosson

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
na systemet är tidigare prövat i utlandet, men i den
form det kommer att provas på provloken har det så
många nyheter och finesser, att det kan förmodas
resultera i ett bättre resultat än som förut nåtts.
Högspänningsregleringssystemen komma att utföras
enligt av firman Brown Boveri angiven princip, som
sedan många år tillämpats på schweiziska lok. Såsom
förut angivits utföras de som fig. 8 visar som
steg-kopplare på en sparkopplad högspänningslindning,
varigenom olika spänningar tillföras en andra
högspänningslindning, som i sin ordning är sparkopplad
med den för lokomotorernas drift erforderliga låg-
––|||l RESIERUNDN.
KONTAKT AN OR DM.
MOTORER ,
Fig.
Regleringsanordning, system Brown Boveri.
spänningslindningen. Genom denna anordning
kommer man ifrån reglering på lågspänningssidan, vilket
är huvudändamålet med systemet, då ju
strömstyrkorna där uppgå ända till 10 000 ampere.
Stegkoppla-rens konstruktion är det väsentliga i detta system och
byggde ursprungligen på det i firman använda
låg-spänningssystemet, men är i sin slutgiltiga
utformning helt annorlunda. För lågspänning var det
utfört med kontaktarm och släpkontakt, medan det för
högspänning utföres med i kullager lagrade och med
särskilda efterspänningsanordningar försedda
rullkontakter. Regleringssystemet inbygges i
huvudtransformatorns låda, skild från själva transformatorn
endast genom en isolerande mellanvägg. Risken för
att avnött materiel skall nedfalla i
transformatorlind-ningen är minimal genom den valda konstruktionen
och dess placering i förhållande till transformatorn.
Årslång erfarenhet har visat, att några risker icke
finnas.
Den av den blivande tillverkaren, ASEA, valda
konstruktionen avviker i utförandet väsentligt från den
nu beskrivna och är baserad på en för fasta
anläggningar använd stegkopplare med en gaffelformig
kontaktanordning, som styres så, att gaffelkontakten rör
sig ryckvis från den ena kontakten till den andra på
en cirkulär bana. Skillnaden i rörelsen mellan den
förra likformiga rörelsen och den senare periodiska
stegformiga är påtaglig, och först erfarenheten kan
visa om konstruktionen fyller de krav, som ställas på
den.
Beträffande antalet steg så bli desamma vid
hög-spänningsreglering endast omkring 30, emedan plats
ej med tillräcklig säkerhet kan beredas för flera inom
transformatorn, om dimensionerna skola hållas inom
rimliga gränser. För att ändå få karaktären av
finreglering måste därför intervallerna mellan stegen
successivt ökas, helst i förhållandet till det dubbla för
att utnyttja motorns karakteristik under hela
start-ningens förlopp. Då mellan varje överkoppling ett
motstånd momentant är inkopplat mellan uttagen,
framgår härav, att detta måste dimensioneras för det
högsta spänningsintervallet. Vid de lägre uttagen
kommer därför en spänningssänkning att inträda
under överkopplingsperioden, vilken emellertid icke får
uppgå till så högt värde, att spänningen sjunker
under det uttag, som skall lämnas. Tar man hänsyn till
belastningarna vid lägsta och högsta spänningen, kan
emellertid även detta problem lösas.
All finreglering tar sikte på att smidigt starta ett
lok under yttersta utnyttjande av adhesionsvikten.
Som förut angivits kan denna genom finregleringen
utnyttjas väsentligt bättre, varför finregleringen har
sin uppgift att fylla både vid snälltågs- och
godstågs-drift. Genom att göra finregleringen motordriven och
automatisk har man dessutom i sin hand att påverka
regleringsförloppet både med hänsyn till
strömstyrkan och hastigheten. I detta fall kommer ett system
med 5 olika hastigheter att väljas för
lågspännings-regleringen, varierande mellan 10 och 200 sekunder
för fullständig uppkoppling, medan för
högspännings-regleringen endast tvenne sådana möjligheter stå till
buds.
G. Drivmotorerna.
I fråga om huvudmotorer är valet beträffande typen
numera självklar, i det att den vanliga seriemotorn
med vändpoler och parallellmotstånd är given.
Utvecklingen hänför sig huvudsakligen till ett bättre
utnyttjande av material, vilket bäst framgår av
vikten per hk, vilken numera närmar sig 5 kg, varigenom
enfasmotorn kan byggas lika lätt och i vissa fall
lättare än en likströmsmotor. En faktor, som särskilt
påverkar vikt och inbyggd effekt, är
periferihastigheten i luftgapet och på kollektorytan, vilken närmar
sig resp. 60 och 45 m/sek. Därjämte påverkas
dimensionerna av den s. k. strömbelastningsfaktorn, mätt i
ampere-ledare per cm. Värdet på denna är numera
omkring 500 och genom noggrann dimensionering
möjliggöras låga förluster och god ventilation.
Tätheten i tänder och luftgapet (cirka 20 000 resp. 9 000
gauss) har under senaste åren stabiliserat sig.
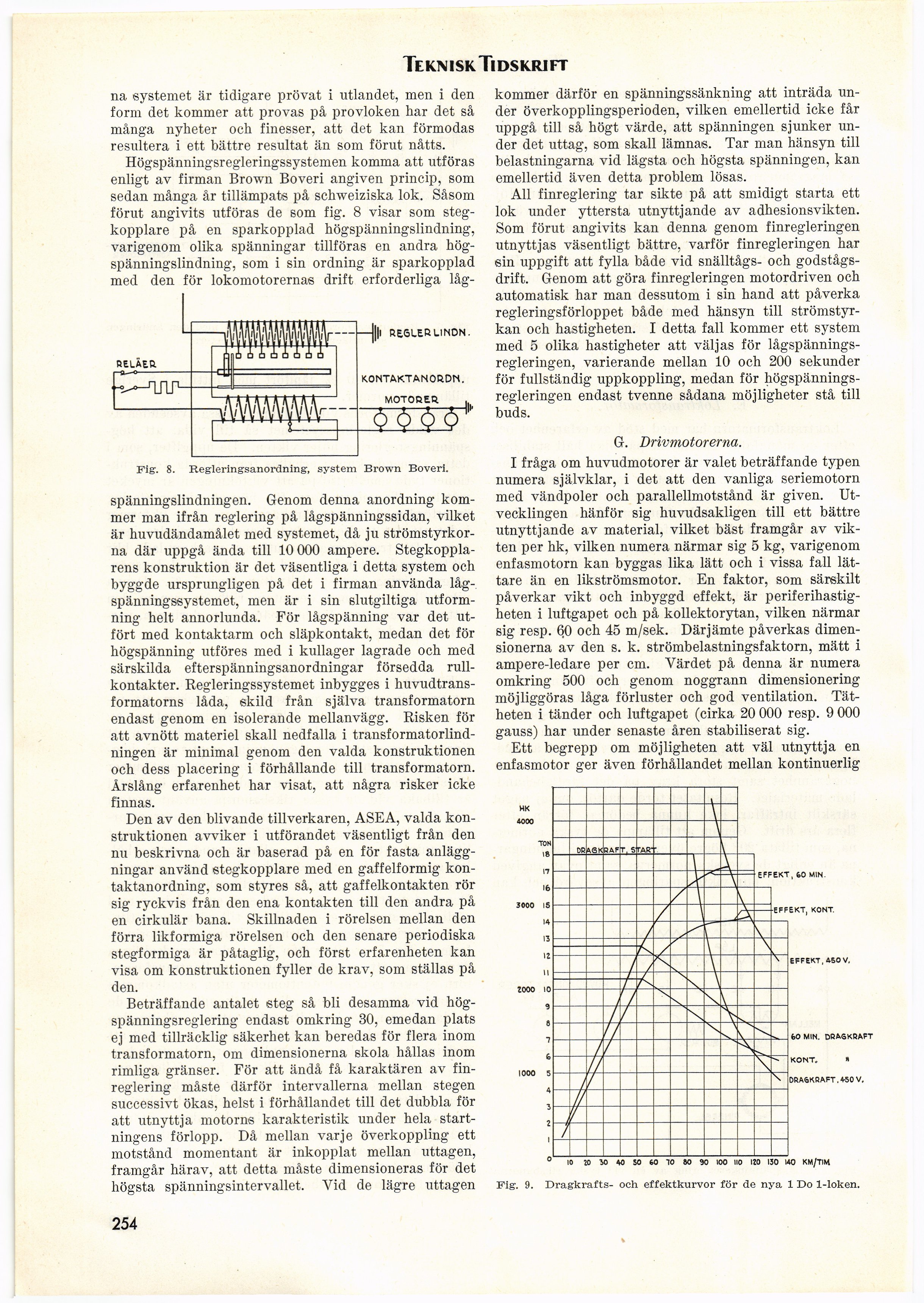
Ett begrepp om möjligheten att väl utnyttja en
enfasmotor ger även förhållandet mellan kontinuerlig
EFFEKT, 60 MIN.
EFFEKT, KONT.
EFFEKT,450 V,
60 MIN. DRASKRAFT
KONT. *
DRAGKRAFT. 4-50 V,
Fig.
10 20 SO 40 50 60 10 80 90 100 110 120 130 140 KM/TIM
Dragkrafts- och effektkurvor för de nya 1 Do 1-loken.
254
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}