
Full resolution (JPEG) - On this page / på denna sida - Sidor ...

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Elektroteknik
Spårutformning vid smärre elektriska motorer.
Av E. MORATH.
Smärre elektriska motorer arbeta praktiskt taget
undantagslöst vid i förhållande till effekten höga
spänningar och lindas följaktligen i relativt klena
ledardimensioner, varför, då s. k. fasonkoppar ej kan
ifrågakomma, inga skäl föreligga att som för större
maskiner hålla spårbredden konstant. Spårformen kan
väljas tämligen godtyckligt och spåren utformas
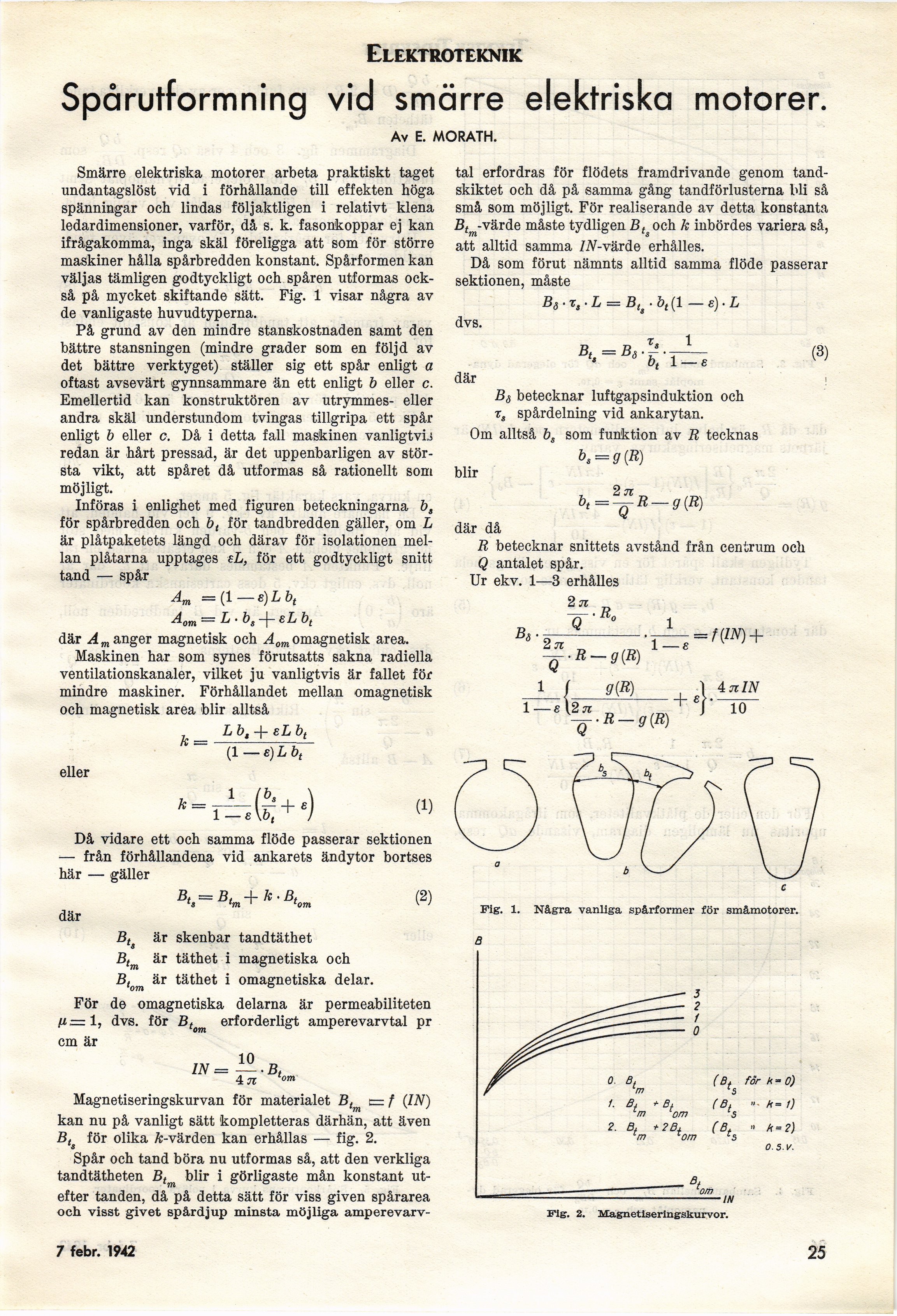
också på mycket skiftande sätt. Fig. 1 visar några av
de vanligaste huvudtyperna.
På grund av den mindre stanskostnaden samt den
bättre stansningen (mindre grader som en följd av
det bättre verktyget) ställer sig ett spår enligt a
oftast avsevärt gynnsammare än ett enligt b eller c.
Emellertid kan konstruktören av utrymmes- eller
andra skäl understundom tvingas tillgripa ett spår
enligt b eller c. Då i detta fall maskinen vanligtvis
redan är hårt pressad, är det uppenbarligen av
största vikt, att spåret då utformas så rationellt som
möjligt.
Införas i enlighet med figuren beteckningarna b,
för spårbredden och bt för tandbredden gäller, om L
är plåtpaketets längd och därav för isolationen
mellan plåtarna upptages sL, för ett godtyckligt snitt
tand — spår
=(1 —s)Lbt
Aom = L-bs-f eL bt
där A m anger magnetisk och Aom omagnetisk area.
Maskinen har som synes förutsatts sakna radiella
ventilationskanaler, vilket ju vanligtvis är fallet för
mindre maskiner. Förhållandet mellan omagnetisk
och magnetisk area blir alltså
L b, -f- sL bt
Å =
(1— e)Lbt
eller
k
(1)
Då vidare ett och samma flöde passerar sektionen
— från förhållandena vid ankarets ändytor bortses
här — gäller
där
För
ß= 1,
cm är
Bt — B. + k- Bt
ls ’m 1 lo m
är skenbar tandtäthet
är täthet i magnetiska och
är täthet i omagnetiska delar.
(2)
Bt
’a
Bt
’m
B,
’o:..
de omagnetiska delarna är permeabiliteten
dvs. för Bt erforderligt amperevarvtal pr
IN :
10
4 n
■ Bt
’/v
Magnetiseringskurvan för materialet Blm e= † (IN)
kan nu på vanligt sätt kompletteras därhän, att även
B,s för olika Ä-värden kan erhållas — fig. 2.
Spår och tand böra nu utformas så, att den verkliga
tandtätheten Btm blir i görligaste mån konstant
utefter tanden, då på detta sätt för viss given spårarea
och visst givet spårdjup minsta möjliga amperevarv-
tal erfordras för flödets framdrivande genom
tandskiktet och då på samma gång tandförlusterna bli så
små som möjligt. För realiserande av detta konstanta
ßfm-värde måste tydligen och k inbördes variera så,
att alltid samma IN-vä,rde erhålles.
Då som förut nämnts alltid samma flöde passerar
sektionen, måste
Bs ■ z, • L — B
dvs.
r
Bt, = Bå •
bt(l-e)-L
1
där
bt I-
(3)
B g betecknar luftgapsinduktion och
t, spårdelning vid ankarytan.
Om alltså bs som funktion av B tecknas
bs = 9(R)
blir
b^^R — g[R)
där då
R betecknar snittets avstånd från centrum och
Q antalet spår.
Ur ekv. 1—3 erhålles
~Q 0 1
Fig. 1. Några vanliga spårformer för småmotorer.
(Bf för k’O)
t,
(b’>
h=t)
2. B, + 2 B+
(Bt » k-2)
O.S.V.
-1 fi
Fig. 2. Magnetiseringskurvor.
7 febr. 1942
17
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}