
Full resolution (JPEG) - On this page / på denna sida - Häfte 3. 16 jan. 1943 - Metoder för snabbreglering i kraft- och industrianläggningar, av Aage Garde

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
d2 s
samma acceleration „l för massan som för punkten
dt1
■— och sålunda även samma hastighet och samma väg.
Är massan påverkad av en dämpkraft proportionell
mot hastigheten måste man även påverka den med
en påtryckt kraft proportionell mot styrpunktens
hastighet. Vi se sålunda, att den idealiska regleringen
av vägen Sj erhålles genom reglering av acceleration
och hastighet. Ifall av någon orsak en vågdifferens
s — s1 har uppstått, bör även finnas en kraft, som
utjämnar denna, men om de båda andra
komponenterna äro rätt avvägda, kan denna vara ganska liten.
Dessa synpunkter äga allmän giltighet även vid andra
regleringar, där trögheten exempelvis ligger i en
generators fält eller en maskins svängmassa, att bästa
och snabbaste reglering erhålles, om man låter
regulatorn känna, icke bara den reglerade storheten, men
även dennas första och andra derivata.
I verkligheten är förhållandet i allmänhet det, att man
önskar att snabbt utjämna en tillfällig differens (s—
Av denna orsak måste vägdifferenskomponenten
vara stor, och för att erhålla aperiodiskt eller nästan
aperiodiskt insvängningsförlopp måste man
appli-ds
cera en dämpning k • —i, som vid följ ning med kon-
a t
stant hastighet kompenseras av kraften från
styrds
punkten k Massan m påverkas sålunda av
följande krafter
K (s
= k(ds—^sA
\dt dt!
«l)
d-h)
dt)
d2s
dt2’
dæ
dt
, då spänningen är proportionell mot vinkelhastig-
Metodens tillämpning på syngonstyrning av stora
massor visas på fig. 21. Den övre bilden visar
schematiskt den använda apparaturen. Massan 0 drives
av en motor över en hydraulisk växel, som
regleras genom vridning av en regleringsarm från noll till
max. hastighet åt båda hållen. Från styrdonet
överföres vinkelläget medelst syngonöverföring till en
liten syngonmottagare, som maximalt får belastas
med några gcm moment. Problemet är nu att driva
massan 0 så att den exakt följer denna
syngonmottagare.
Vinkeldifferensen mätes med en
"vinkelskillnads-givare", som består av en enfasig induktionsregulator,
vilkens stator vrides av massan 0, medan rotorn
vrides av syngonelementet. Statorn matas med 50 p/s
växelström och i rotorn induceras sålunda en
spänning, som är noll då lindningarna äro vinkelräta mot
varandra men som växer med sinus till
differensvinkeln. Just vid nollgenomgången växlar
sekundärspänningens fas 180°. Denna sekundärspänning föres
till en förstärkare, där även hastighetsskillnaden
mellan massan 0 och styrdonet införes som
differensspänning mellan två "hastighetsgivare", av vilka den
ena drives av massan och den andra av styrdonet.
Inkoppla vi en kondensator i denna krets erhålla vi
ett spänningsfall över gallermotståndet proportionellt
mot laddningsströmmen till denna kondensator eller
d E
med andra ord proportionell mot — eller mot
CL Z
heten. Koppla vi ett motstånd i parallell till
kondensatora få vi en impuls proportionell mot o. Vi
införa sålunda i förstärkaren dels vinkelskillnaden oc,
di oc
dels hastighetsdifferensen ^ - och dels
accelerations-d1 oc
differensen —Egentligen borde man införa en
dt2
impuls proportionell mot accelerationen av styrdonet
och icke endast accelerationsdifferensen, men detta
är ganska svårt att erhålla i denna koppling, om icke
en extra hastighetsgivare på styrdonet skall införas,
och resultaten ha visat sig tillfredsställande även utan
denna komplikation.
Förstärkarens konstruktion är ganska egenartad,
då den arbetar med växelspänning på rörens anoder.
Regulatorns spole är inkopplad i anodkretsen med
mittuttag, så att anodströmmarna i de båda rören
ge ställkraft åt var sitt håll, så att då strömmarna
äro lika är ställkraften 0.
Diagrammet visar hur strömmen under ena
halvperioden går genom rör A, under andra genom rör B.
Vrides nu induktionsregulatorn åt ena sidan erhålles
en sekundärspänning i gallerkretsen av t.ex. sådan
fas, att gallerspänningen blir positiv under den
halvperiod, då rör A har positiv anodspänning.
Strömmen i rör A ökas därför. Under nästa halvperiod har
rör B positiv anodspänning, men nu har
gallerspänningen även bytt tecken, så att strömmen i rör B
minskar. Resultatet blir en obalans och en
resulterande ställkraft i spolen åt ena hållet. Då
induktionsregulatorn vrides åt motsatt håll växlar dess
sekundärspänning fas, så att ställkraften på spolen
går i motsatt riktning. På samma sätt komma
hastighet och acceleration att införas till regulatorn.
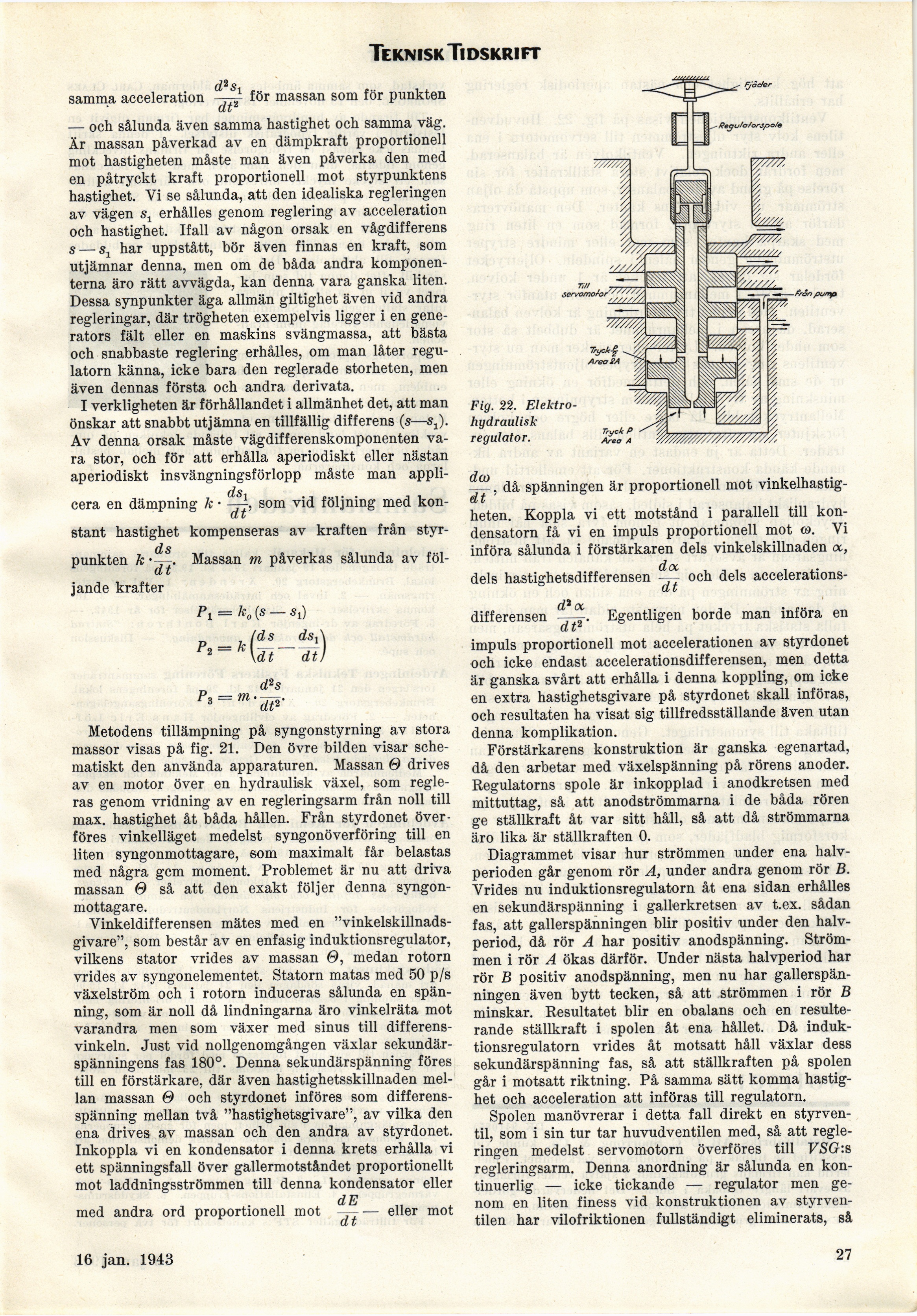
Spolen manövrerar i detta fall direkt en
styrven-til, som i sin tur tar huvudventilen med, så att
regleringen medelst servomotorn överföres till FSG:s
regleringsarm. Denna anordning är sålunda en
kontinuerlig — icke tickande — regulator men
genom en liten finess vid konstruktionen av
styrventilen har vilofriktionen fullständigt eliminerats, så
Fig. 22.
Elektrohydraulisk
regulator.
Tryck P
Areo A
30 jan. 1943
27
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}