
Full resolution (JPEG) - On this page / på denna sida - H. 37. 13 oktober 1951 - Nya metoder - Ellok för gods- och passagerartrafik, av F Ö - Elektromagnetisk längdlikare, av sah - Amerikanska V2-robotar, av sah
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
844
TEKNISK TIDSKRIFT
Manöverspänning och belysningsspänning levereras av en
motorgenerator, som arbetar parallellt med ett 110 A’
batteri.
Förutom manöverventiler för lokomotivets
trycklufts-broms och tågets vakuumbroms finnes även en mekanisk
parkeringsbroms i varje förarhytt, vilken verkar på den
närmaste boggin (Engineer aug. 1950). FÖ
Elektromagnetisk längdlikare. I en amerikansk
borrmaskin erhålles den exakta tumdelningen genom en
likare, bestående av en metallstång med rektangulära
upphöjningar med exakt 1" avstånd mellan sina magnetiska
centra. Två likarstänger används, den ena monterad på
bädden i längdriktningen, den andra på släden i
tvärriktning.
Under varje stång finns en elektromagnet, som då den
passeras av upphöjningarnas magnetiska centrum ger en
nollavläsning på ett mätinstrument. För att bestämma
hålets läge ställer arbetaren in en mikrometer på den
önskade bråkdelen av tum och ställer därefter med
matningsskruven in mätaren på noll (Amer. Mach. 5 febr.
1951). sah
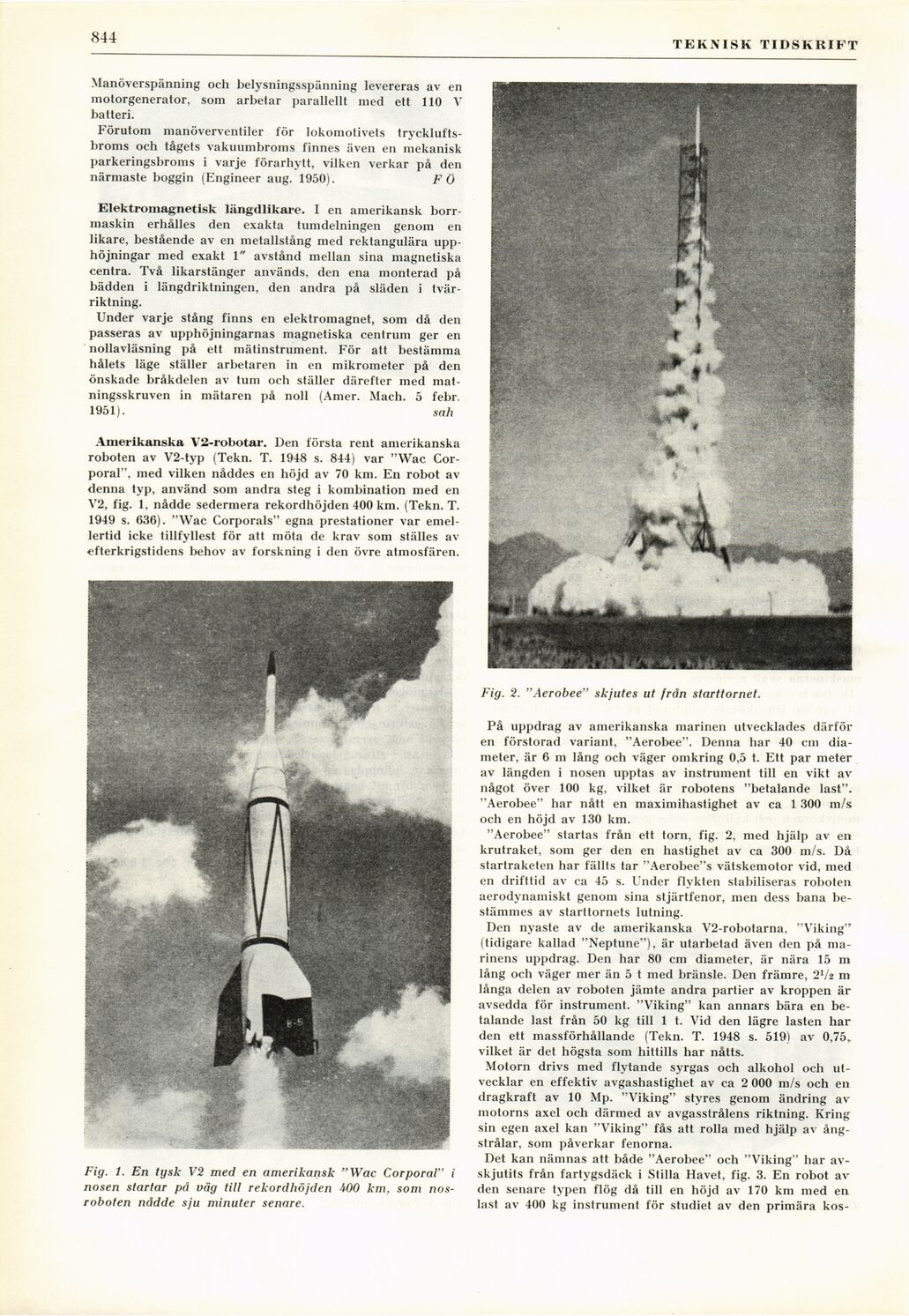
Amerikanska V2-robotar. Den första rent amerikanska
roboten av V2-typ (Tekn. T. 1948 s. 844) var "Wac
Cor-poral", med vilken nåddes en höjd av 70 km. En robot av
denna typ, använd som andra steg i kombination med en
V2, fig. 1, nådde sedermera rekordhöjden 400 km. (Tekn. T.
1949 s. 636). "Wac Corporals" egna prestationer var
emellertid icke tillfyllest för att möta de krav som ställes av
efterkrigstidens behov av forskning i den övre atmosfären.
Fig. 1. En tysk V2 med en amerikansk "Wac Corporal" i
nosen startar på väg till rekordhöjden MO km. som
nos-roboten nådde sju minuter senare.
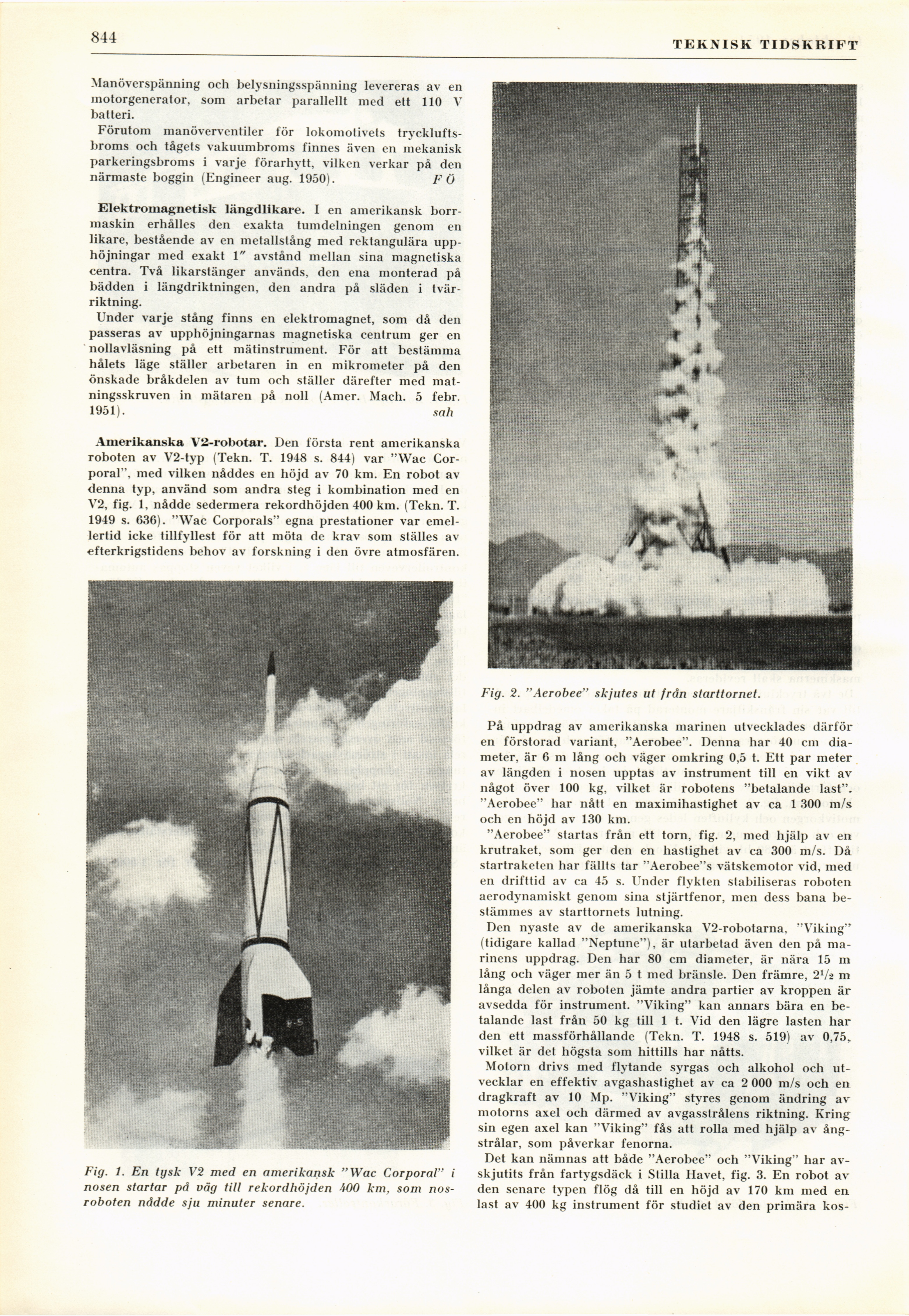
Fig. 2. "Aerobee" skjutes ut från starttornet.
På uppdrag av amerikanska marinen utvecklades därför
en förstorad variant, "Aerobee". Denna har 40 cm
diameter, är 6 m lång och väger omkring 0,5 t. Ett par meter
av längden i nosen upptas av instrument till en vikt av
något över 100 kg, vilket är robotens "betalande last".
"Aerobee" har nått en maximihastighet av ca 1 300 m/s
och en höjd av 130 km.
"Aerobee" startas från ett torn, fig. 2, med hjälp av en
krutraket, som ger den en hastighet av ca 300 m/s. Då
startraketen har fällts tar "Aerobee"s vätskemotor vid, med
en drifttid av ca 45 s. Under flykten stabiliseras roboten
aerodynamiskt genom sina stjärtfenor, men dess bana
bestämmes av starttornets lutning.
Den nyaste av de amerikanska V2-robotarna, "Viking"’
(tidigare kallad "Neptune"), är utarbetad även den på
marinens uppdrag. Den har 80 cm diameter, är nära 15 m
lång och väger mer än 5 t med bränsle. Den främre, 2V2 m
långa delen av roboten jämte andra partier av kroppen är
avsedda för instrument. "Viking" kan annars bära en
betalande last från 50 kg till 1 t. Vid den lägre lasten har
den ett massförhållande (Tekn. T. 1948 s. 519) av 0,75,
vilket är det högsta som hittills har nåtts.
Motorn drivs med flytande syrgas och alkohol och
utvecklar en effektiv avgashastighet av ca 2 000 m/s och en
dragkraft av 10 Mp. "Viking" styres genom ändring av
motorns axel och därmed av avgasstrålens riktning. Kring
sin egen axel kan "Viking" fås att rolla med hjälp av
ång-strålar, som påverkar fenorna.
Det kan nämnas att både "Aerobee" och "Viking" har
av-skjutits från fartygsdäck i Stilla Havet, fig. 3. En robot av
den senare typen flög då till en höjd av 170 km med en
last av 400 kg instrument för studiet av den primära kos-
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}