
Full resolution (JPEG) - On this page / på denna sida - H. 31. 2 september 1952 - Principer och metoder för fjärrmätning, av Tord Wikland, Rune Ferngren och Dag Hartman

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
2 september lf)52
703
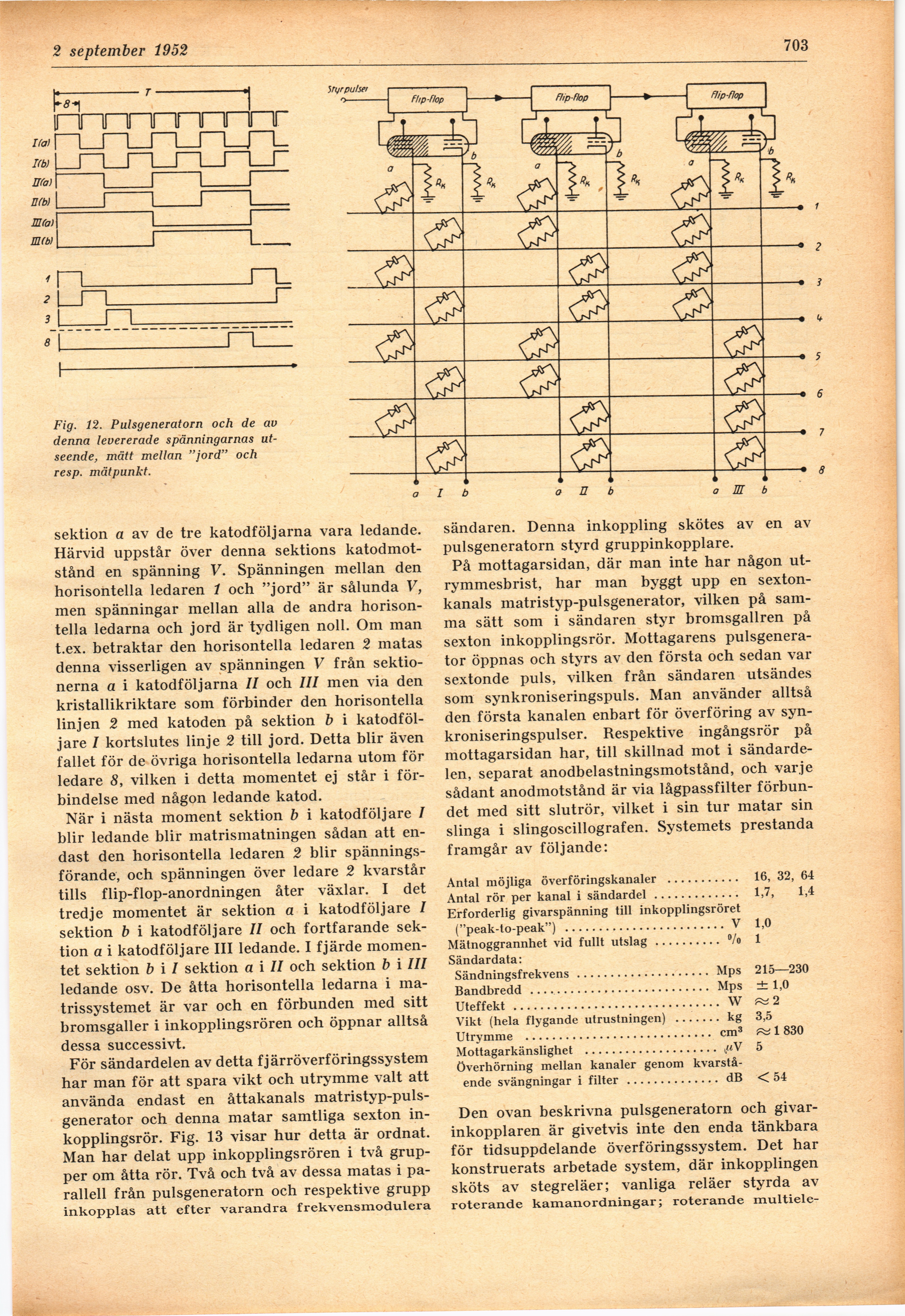
Fig. 12. Pulsgeneratorn och de av
denna levererade spänningarnas
utseende, mätt mellan "jord" och
resp. mätpunkt.
sektion a av de tre katodföljarna vara ledande.
Härvid uppstår över denna sektions
katodmot-stånd en spänning V. Spänningen mellan den
horisontella ledaren 1 och "jord" är sålunda V,
men spänningar mellan alla de andra
horisontella ledarna och jord är tydligen noll. Om man
t.ex. betraktar den horisontella ledaren 2 matas
denna visserligen av spänningen V från
sektionerna a i katodföljarna II och III men via den
kristallikriktare som förbinder den horisontella
linjen 2 med katoden på sektion b i
katodföl-jare I kortslutes linje 2 till jord. Detta blir även
fallet för de övriga horisontella ledarna utom för
ledare 8, vilken i detta momentet ej står i
förbindelse med någon ledande katod.
När i nästa moment sektion b i katodföljare I
blir ledande blir matrismatningen sådan att
endast den horisontella ledaren 2 blir
spänningsförande, och spänningen över ledare 2 kvarstår
tills flip-flop-anordningen åter växlar. I det
tredje momentet är sektion a i katodföljare I
sektion b i katodföljare II och fortfarande
sektion a i katodföljare III ledande. I fjärde
momentet sektion b i I sektion a i II och sektion b i III
ledande osv. De åtta horisontella ledarna i
matrissystemet är var och en förbunden med sitt
bromsgaller i inkopplingsrören och öppnar alltså
dessa successivt.
För sändardelen av detta fjärröverföringssystem
har man för att spara vikt och utrymme valt att
använda endast en åttakanals
matristyp-pulsgenerator och denna matar samtliga sexton
inkopplingsrör. Fig. 13 visar hur detta är ordnat.
Man har delat upp inkopplingsrören i två
grupper om åtta rör. Två och två av dessa matas i
parallell från pulsgeneratorn och respektive grupp
inkopplas att efter varandra frekvensmodulera
sändaren. Denna inkoppling skötes av en av
pulsgeneratorn styrd gruppinkopplare.
På mottagarsidan, där man inte har någon
utrymmesbrist, har man byggt upp en
sextonkanals matristyp-pulsgenerator, vilken på
samma sätt som i sändaren styr bromsgallren på
sexton inkopplingsrör. Mottagarens
pulsgenerator öppnas och styrs av den första och sedan var
sextonde puls, vilken från sändaren utsändes
som synkroniseringspuls. Man använder alltså
den första kanalen enbart för överföring av
synkroniseringspulser. Respektive ingångsrör på
mottagarsidan har, till skillnad mot i
sändardelen, separat anodbelastningsmotstånd, och varje
sådant anodmotstånd är via lågpassfilter
förbundet med sitt slutrör, vilket i sin tur matar sin
slinga i slingoscillografen. Systemets prestanda
framgår av följande:
Antal möjliga överföringskanaler ........... 16, 32, 64
Antal rör per kanal i sändardel............. 1,7, 1,4
Erforderlig givarspänning till inkopplingsröret
("peak-to-peak") ........................V 1,0
Mätnoggrannhet vid fullt utslag.......... °/o 1
Sändardata:
Sändningsfrekvens .................... Mps 215—230
Bandbredd........................... Mps ±1,0
Uteffekt ............................... W
Vikt (hela flygande utrustningen) .......kg 3,5
Utrymme ............................ cm3 f^ 1830
Mottagarkänslighet ....................i«V 5
överhörning mellan kanaler genom
kvarstående svängningar i filter ..............dB <54
Den ovan beskrivna pulsgeneratorn och
givar-inkopplaren är givetvis inte den enda tänkbara
för tidsuppdelande överföringssystem. Det har
konstruerats arbetade system, där inkopplingen
sköts av stegreläer; vanliga reläer styrda av
roterande kamanordningar; roterande multiele-
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}