
Full resolution (JPEG) - On this page / på denna sida - H. 17. 26 april 1955 - Automatteknik inom försvaret, av Tord Wikland
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
12 april 1955
389
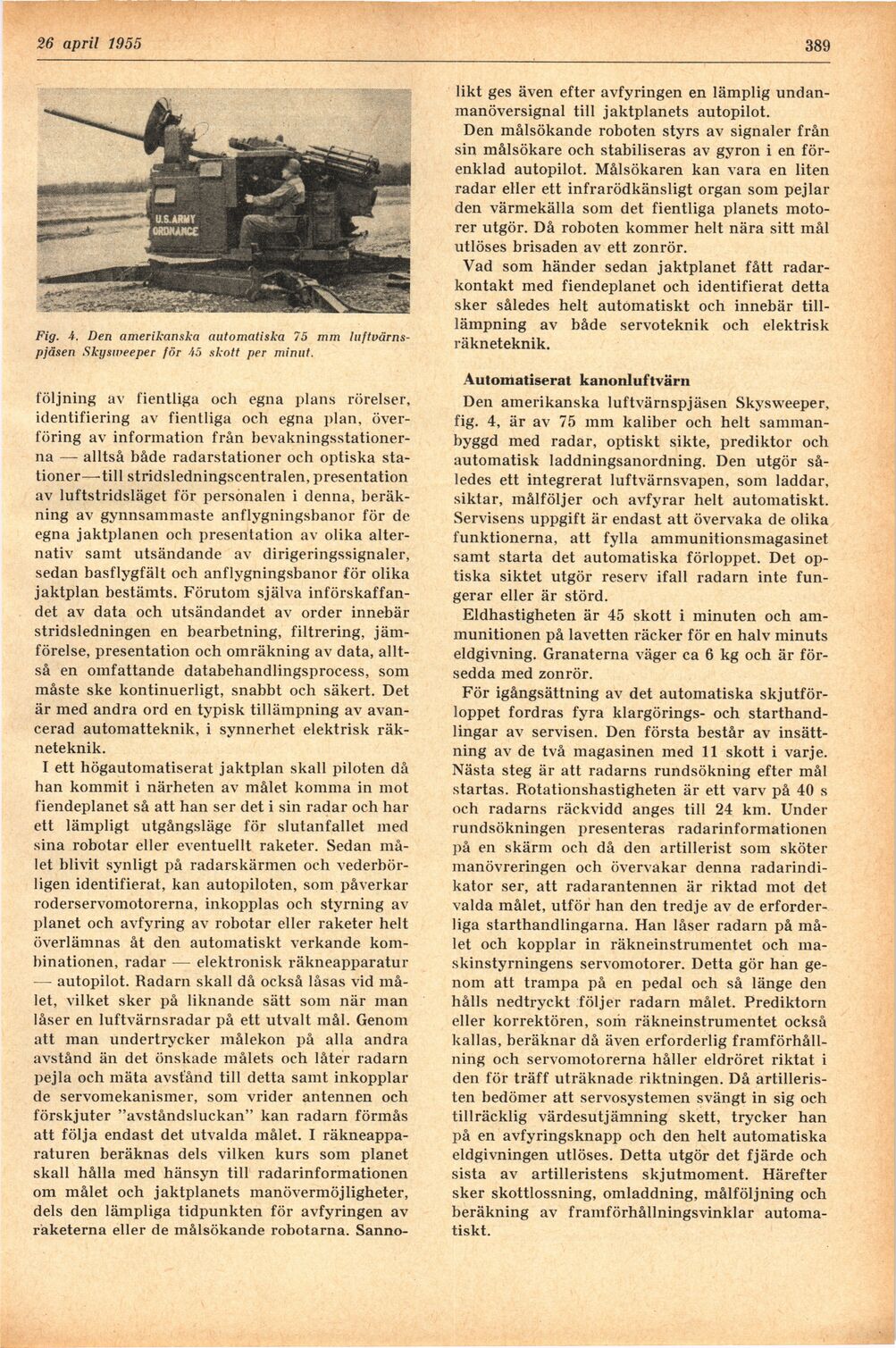
Fig. 4. Den amerikanska automatiska 75 mm
luftvärns-pjäsen Skysweeper för 45 skott per minut.
följning av fientliga och egna plans rörelser,
identifiering av fientliga och egna plan,
överföring av information från
bevakningsstationerna — alltså både radarstationer och optiska
stationer—■ til I stridsledningscentralen, presentation
av luftstridsläget för personalen i denna,
beräkning av gynnsammaste anflygningsbanor för de
egna jaktplanen och presentation av olika
alternativ samt utsändande av dirigeringssignaler,
sedan basflygfält och anflygningsbanor för olika
jaktplan bestämts. Förutom själva
införskaffandet av data och utsändandet av order innebär
stridsledningen en bearbetning, filtrering,
jämförelse, presentation och omräkning av data,
alltså en omfattande databehandlingsprocess, som
måste ske kontinuerligt, snabbt och säkert. Det
är med andra ord en typisk tillämpning av
avancerad automatteknik, i synnerhet elektrisk
räk-neteknik.
I ett högautoinatiserat jaktplan skall piloten då
han kommit i närheten av målet komma in mot
fiendeplanet så att han ser det i sin radar och har
ett lämpligt utgångsläge för slutanfallet med
sina robotar eller eventuellt raketer. Sedan
målet blivit synligt på radarskärmen och
vederbörligen identifierat, kan autopiloten, som påverkar
roderservomotorerna, inkopplas och styrning av
planet och avfyring av robotar eller raketer helt
överlämnas åt den automatiskt verkande
kombinationen, radar — elektronisk räkneapparatur
— autopilot. Radarn skall då också låsas vid
målet, vilket sker på liknande sätt som när man
låser en luftvärnsradar på ett utvalt mål. Genom
att man undertrycker inålekon på alla andra
avstånd än det önskade målets och låter radarn
pejla och mäta avstånd till detta samt inkopplar
de servomekanismer, som vrider antennen och
förskjuter "avståndsluckan" kan radarn förmås
att följa endast det utvalda målet. I
räkneappa-raturen beräknas dels vilken kurs som planet
skall hålla med hänsyn till radarinformationen
om målet och jaktplanets manövermöjligheter,
dels den lämpliga tidpunkten för avfyringen av
raketerna eller de målsökande robotarna. Sanno-
likt ges även efter avfyringen en lämplig
undanmanöversignal till jaktplanets autopilot.
Den målsökande roboten styrs av signaler från
sin målsökare och stabiliseras av gyron i en
förenklad autopilot. Målsökaren kan vara en liten
radar eller ett infrarödkänsligt organ som pejlar
den värmekälla som det fientliga planets
motorer utgör. Då roboten kommer helt nära sitt mål
utlöses brisaden av ett zonrör.
Vad som händer sedan jaktplanet fått
radarkontakt med fiendeplanet och identifierat detta
sker således helt automatiskt och innebär
till-lämpning av både servoteknik och elektrisk
räkneteknik.
Automatiserat kanonluftvärn
Den amerikanska luftvärnspjäsen Skysweeper,
fig. 4, är av 75 mm kaliber och helt
sammanbyggd med radar, optiskt sikte, prediktor och
automatisk laddningsanordning. Den utgör
således ett integrerat luftvärnsvapen, som laddar,
siktar, målföljer och avfyrar helt automatiskt.
Servisens uppgift är endast att övervaka de olika
funktionerna, att fylla ammunitionsmagasinet
samt starta det automatiska förloppet. Det
optiska siktet utgör reserv ifall radarn inte
fungerar eller är störd.
Eldhastigheten är 45 skott i minuten och
ammunitionen på lavetten räcker för en halv minuts
eldgivning. Granaterna väger ca 6 kg och är
försedda med zonrör.
För igångsättning av det automatiska
skjutförloppet fordras fyra klargörings- och
starthandlingar av servisen. Den första består av
insättning av de två magasinen med 11 skott i varje.
Nästa steg är att radarns rundsökning efter mål
startas. Rotationshastigheten är ett varv på 40 s
och radarns räckvidd anges till 24 km. Under
rundsökningen presenteras radarinformationen
på en skärm och då den artillerist som sköter
manövreringen och övervakar denna
radarindikator ser, att radarantennen är riktad mot det
valda målet, utför han den tredje av de
erforderliga starthandlingarna. Han låser radarn på
målet och kopplar in räkneinstrumentet och
maskinstyrningens servomotorer. Detta gör han
genom att trampa på en pedal och så länge den
hålls nedtryckt följer radarn målet. Prediktorn
eller korrektören, som räkneinstrumentet också
kallas, beräknar då även erforderlig
framförhållning och servomotorerna håller eldröret riktat i
den för träff uträknade riktningen. Då
artilleristen bedömer att servosystemen svängt in sig och
tillräcklig värdesutjämning skett, trycker han
på en avfyringsknapp och den helt automatiska
eldgivningen utlöses. Detta utgör det fjärde och
sista av artilleristens skjutmoment. Härefter
sker skottlossning, omladdning, målföljning och
beräkning av framförhållningsvinklar
automatiskt.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}