
Full resolution (JPEG) - On this page / på denna sida - 1957, H. 21 - Transportraketer till jordsatelliter, av Björn Bergqvist

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
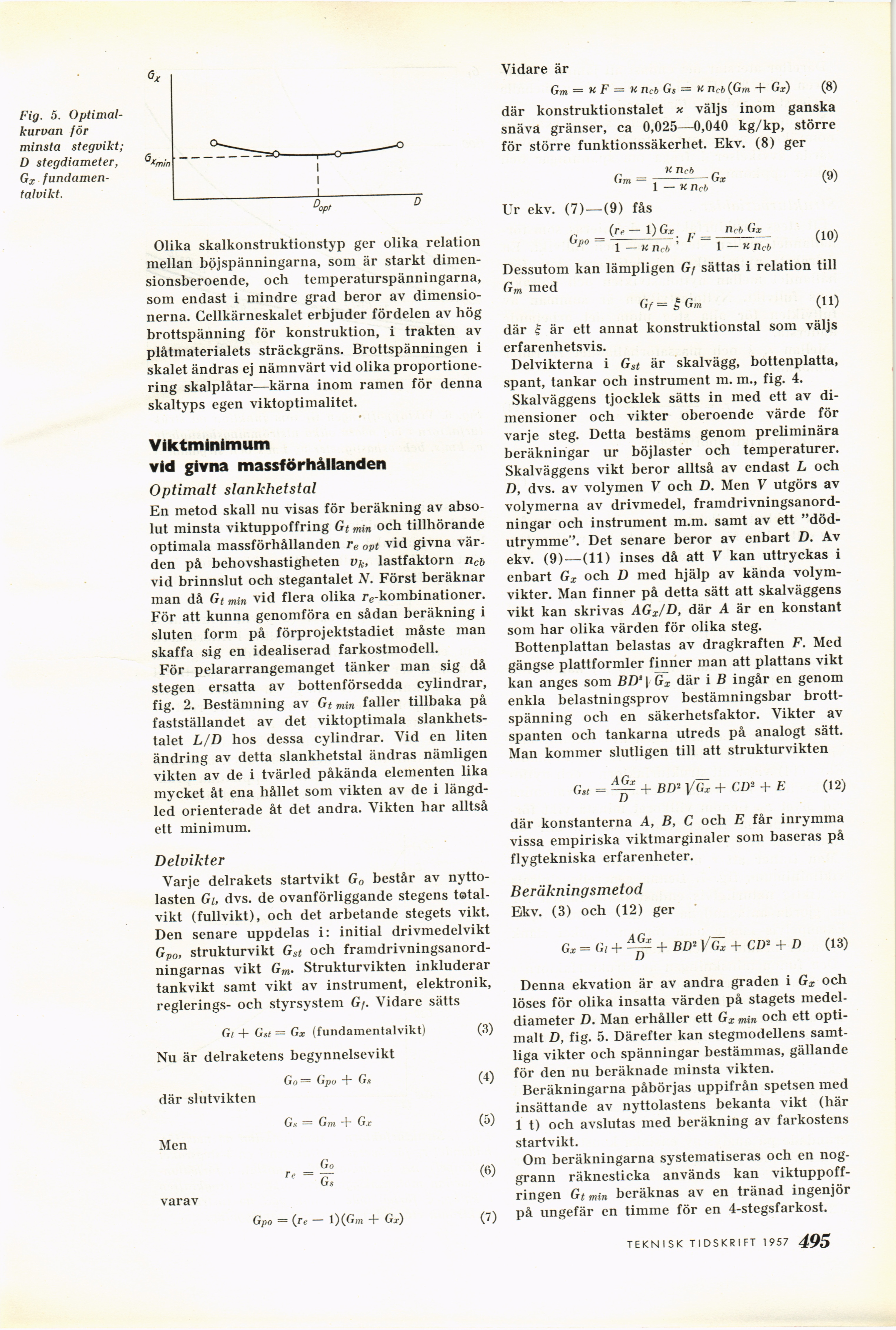
Fig. 5.
Optimalkurvan för
minsta stegvikt;
D stegdiameter,
Gx
fundamentalvikt.
Olika skalkonstruktionstyp ger olika relation
mellan böjspänningarna, som är starkt
dimensionsberoende, och temperaturspänningarna,
som endast i mindre grad beror av
dimensionerna. Cellkärneskalet erbjuder fördelen av hög
brottspänning för konstruktion, i trakten av
plåtmaterialets sträckgräns. Brottspänningen i
skalet ändras ej nämnvärt vid olika
proportionering skalplåtar—kärna inom ramen för denna
skaltyps egen viktoptimalitet.
Viktminimum
vid givna massförhållanden
Optimalt slankhetstal
En metod skall nu visas för beräkning av
absolut minsta viktuppoffring Gt min och tillhörande
optimala massförhållanden re opt vid givna
värden på behovshastigheten Vk, lastfaktorn
vid brinnslut och stegantalet N. Först beräknar
man då Gt min vid flera olika re-kombinationer.
För att kunna genomföra en sådan beräkning i
sluten form på förprojektstadiet måste man
skaffa sig en idealiserad farkostmodell.
För pelararrangemanget tänker man sig då
stegen ersatta av bottenförsedda cylindrar,
fig. 2. Bestämning av Gt min faller tillbaka på
fastställandet av det viktoptimala
slankhets-talet L/D hos dessa cylindrar. Vid en liten
ändring av detta slankhetstal ändras nämligen
vikten av de i tvärled påkända elementen lika
mycket åt ena hållet som vikten av de i
längdled orienterade åt det andra. Vikten har alltså
ett minimum.
Delvikter
Varje delrakets startvikt G0 består av
nyttolasten Gu dvs. de ovanförliggande stegens
t©tal-vikt (fullvikt), och det arbetande stegets vikt.
Den senare uppdelas i: initial drivmedelvikt
Gpo, strukturvikt Gst och
framdrivningsanord-ningarnas vikt Gm. Strukturvikten inkluderar
tankvikt samt vikt av instrument, elektronik,
reglerings- och styrsystem Gf. Vidare sätts
Gi + Gst = Gx (fundamentalvikt)
Nu är delraketens begynnelsevikt
Go = Gpo + Gu
där slutvikten
Men
Gx = Gm + G.c
Go
TY =
G,
Gpo = (re - 1 )(Gm + Gx)
(3)
(4)
(5)
(6)
(7)
Vidare är
Gm = K F = K ncb Gs = K ncb (Gm + Gx) (8)
där konstruktionstalet x väljs inom ganska
snäva gränser, ca 0,025—0,040 kg/kp, större
för större funktionssäkerhet. Ekv. (8) ger
Gm —
k ncb
1 — k nCb
Ur ekv. (7)—(9) fås
(i> - 1) Gx
Gx
G
po
1
F =
n,b Gx
(9)
(10)
k ncb ’ 1 — k ncb
Dessutom kan lämpligen Gf sättas i relation till
Gm med
Gf = § Gm (11)
där f är ett annat konstruktionstal som väljs
erfarenhetsvis.
Delvikterna i Gst är skalvägg, bottenplatta,
spant, tankar och instrument m. m., fig. 4.
Skalväggens tjocklek sätts in med ett av
dimensioner och vikter oberoende värde för
varje steg. Detta bestäms genom preliminära
beräkningar ur böjlaster och temperaturer.
Skalväggens vikt beror alltså av endast L och
D, dvs. av volymen V och D. Men V utgörs av
volymerna av drivmedel,
framdrivningsanord-ningar och instrument m.m. samt av ett
"dödutrymme’’. Det senare beror av enbart D. Av
ekv. (9)—(11) inses då att V kan uttryckas i
enbart Gx och D med hjälp av kända
volymvikter. Man finner på detta sätt att skalväggens
vikt kan skrivas AGX/D, där A är en konstant
som har olika värden för olika steg.
Bottenplattan belastas av dragkraften F. Med
gängse plattformler finner man att plattans vikt
kan anges som BD’ | Gx där i B ingår en genom
enkla belastningsprov bestämningsbar
brottspänning och en säkerhetsfaktor. Vikter av
spanten och tankarna utreds på analogt sätt.
Man kommer slutligen till att strukturvikten
4 fi _
Gst = + BD2 YGX + CD2 + E (12)
där konstanterna A, B, C och E får inrymma
vissa empiriska viktmarginaler som baseras på
flygtekniska erfarenheter.
Beräkningsmetod
Ekv. (3) och (12) ger
Gx = G/ + ~ + BD2 VGX + CD* + D (13)
Denna ekvation är av andra graden i Gx och
löses för olika insatta värden på stagets
medeldiameter D. Man erhåller ett Gx m,-n och ett
optimalt D, fig. 5. Därefter kan stegmodellens
samtliga vikter och spänningar bestämmas, gällande
för den nu beräknade minsta vikten.
Beräkningarna påbörjas uppifrån spetsen med
insättande av nyttolastens bekanta vikt (här
1 t) och avslutas med beräkning av farkostens
startvikt.
Om beräkningarna systematiseras och en
noggrann räknesticka används kan
viktuppoffringen Gt min beräknas av en tränad ingenjör
på ungefär en timme för en 4-stegsfarkost.
TEKNISK TIDSKRIFT 1957 4 95
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}