
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Vektorer
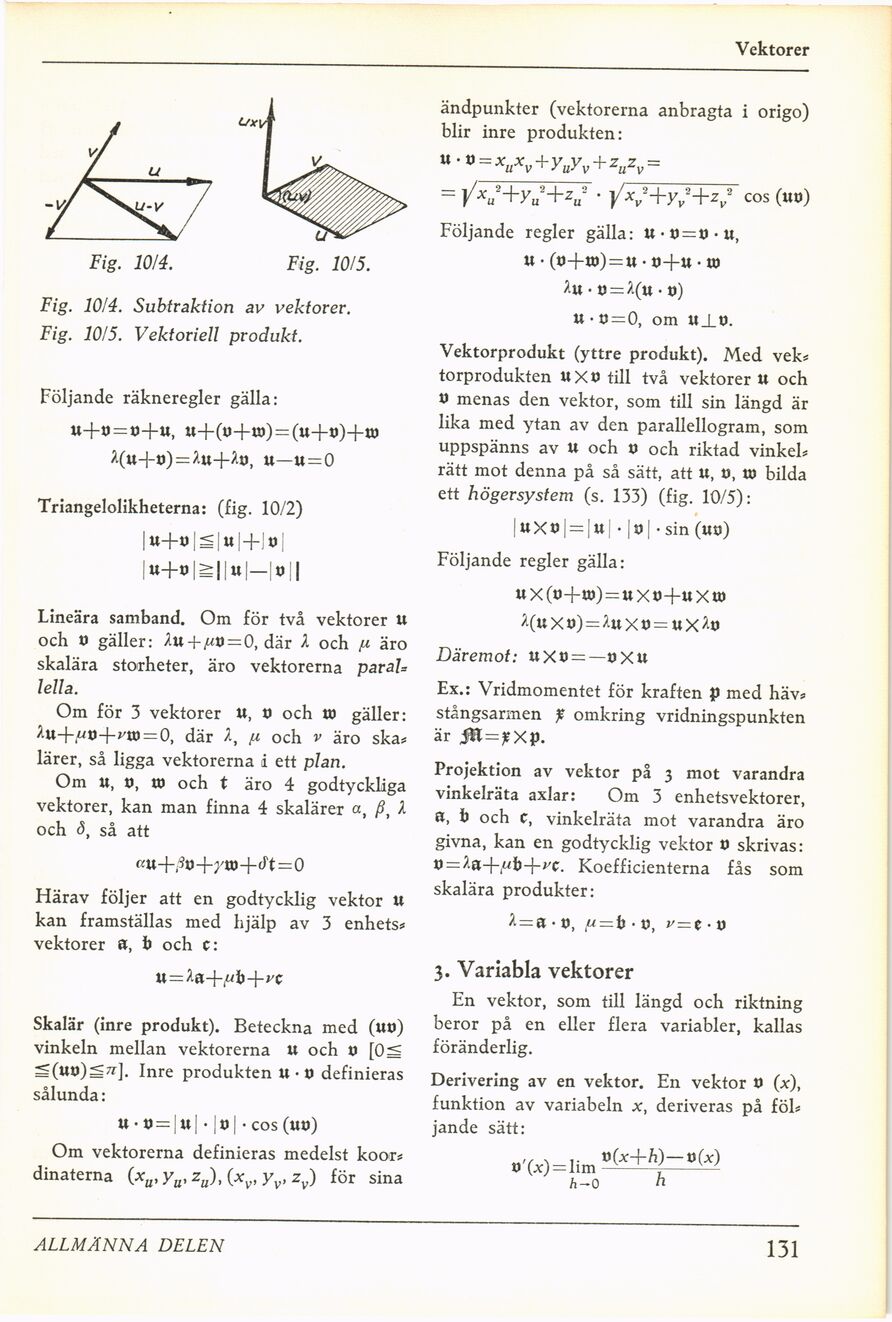
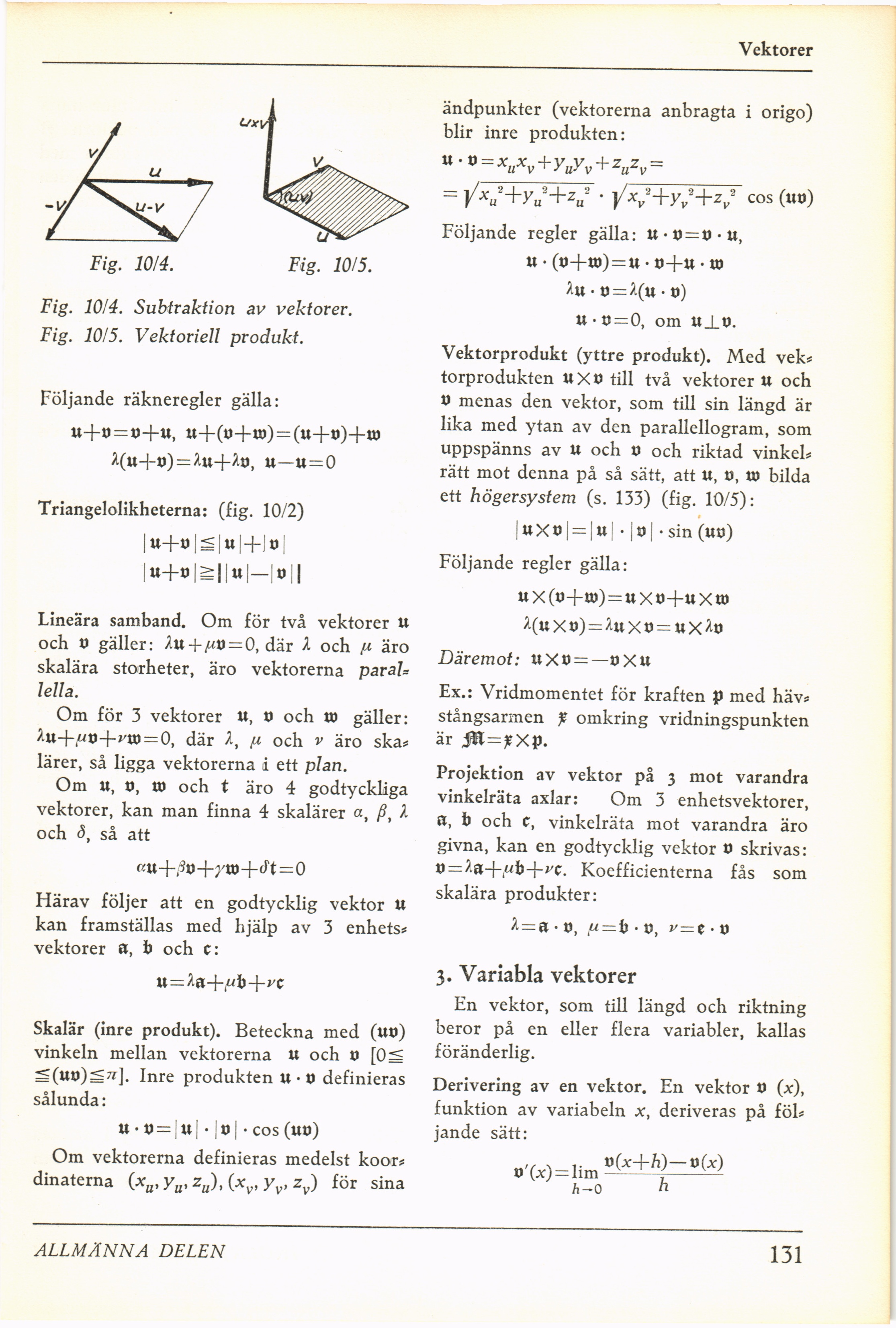
Fig. 10/4. Fig. 10/5.
Fig. 10/4. Subtraktion av vektorer.
Fig. 10/5. Vektoriell produkt.
Följande räkneregler gälla:
tt+t) = t>+«, U+(W+«j) = (U+t»)+tO
Ä(tt+t)) = Ätt+Ätj, u—w=0
Triangelolikheterna: (fig. 10/2)
|tt+o|^||tt|—|ö||
Lineära samband. Om för två vektorer u
och t» gäller: Ätt + /uv = 0, där A och ^ äro
skalära storheter, äro vektorerna paraU
leila.
Om för 3 vektorer tt, t> och rø gäller:
Äit-f «t>+nt> = 0, där Ä, [x och v äro ska*
lärer, så ligga vektorerna i ett plan.
Om «, t), tö och t äro 4 godtyckliga
vektorer, kan man finna 4 skalärer a, ß, A
och <5, så att
«tt+(3ö+yö)+cft=0
Härav följer att en godtycklig vektor U
kan framställas med hjälp av 3 enhets*
vektorer a, b och c:
Skalär (inre produkt). Beteckna med (ttt>)
vinkeln mellan vektorerna W och o
g(wo)g7r]. Inre produkten tt • t> definieras
sålunda:
M. t> = |u| • I o | • eos (tio)
Om vektorerna definieras medelst koor*
dinaterna (xu, ya, zu), {xv, yv, zv) för sina
ändpunkter (vektorerna anbragta i origo)
blir inre produkten:
"■"=Vv+y/v+Vr
= yxu+yu+zu • y/xv+yv!+zv cos C"0)
Följande regler gälla: tt •» = *>■«,
tt • (o+tt)) = tt • t)+tt • O)
Ätt • t) = Ä(tt • t))
tt -t> = 0, om tt_|_t).
Vektorprodukt (yttre produkt). Med vek*
torprodukten ttXO till två vektorer w och
D menas den vektor, som till sin längd är
lika med ytan av den parallellogram, som
uppspänns av tt och t) och riktad vinkel*
rätt mot denna på så sätt, att tt, o, U) bilda
ett högersystem (s. 133) (fig. 10/5):
|ttXtf | = |tt| • |ö| -sin (tto)
Följande regler gälla:
tt X (t>+tö) = tt X t)-f tt X tö
Ä(tt X ö) = Ätt X t> = tt X Äü
Däremot: ux» = -»Xtt
Ex.: Vridmomentet för kraften p med häv*
stångsarmen f omkring vridningspunkten
är =
Projektion av vektor på 3 mot varandra
vinkelräta axlar: Om 3 enhetsvektorer,
a, b och c, vinkelräta mot varandra äro
givna, kan en godtycklig vektor t> skrivas:
t) = Äa+,wb+»’t. Koefficienterna fås som
skalära produkter:
Ä=a • t), . o, i/=e • w
3. Variabla vektorer
En vektor, som till längd och riktning
beror på en eller flera variabler, kallas
föränderlig.
Derivering av en vektor. En vektor t) (x),
funktion av variabeln x, deriveras på föl*
jande sätt:
0’(*) = lim »(«+*)-*«>
h-0 «
ALLMÄNNA DELEN
131
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}