
Full resolution (JPEG) - On this page / på denna sida - H. 21. 22 maj 1956 - Lösning av ett tekniskt problem på Besk, av Göran Kjellberg och Erik Mattson
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
492
•TEKNISK TIDSKRIFT
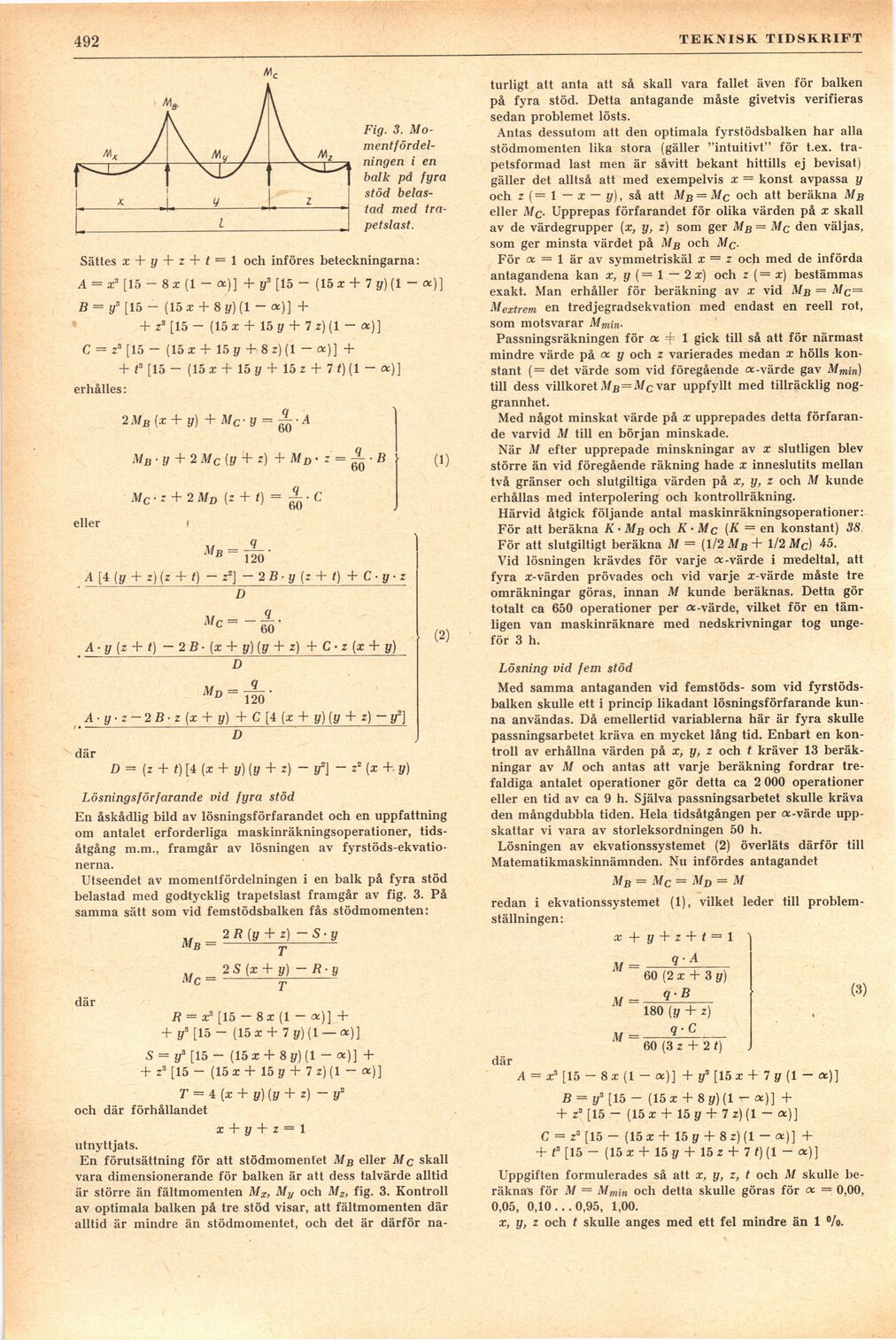
Fig. 3.
Momentfördelningen i en
balk på fyra
stöd
belastad med
trapetslast.
Sättes x+y+z+t— 1 och införes beteckningarna:
A = x3 [15 - 8 x (1 - a)] + y3 [15 - (15 x + 7 y) (1 - a)]
B = y3 [15 - (15 x + 8 y) (1 - a)] +
+ z3 [15 - (15 x + 15 y + 7 z) (1 - a)]
C = z3 [15 - (15 x + 15 y + 8 z) (1 - a)] +
+ t3 [15 - (15 x + 15 y + 15 z + 7 f) (1 - a)]
erhålles:
2 MB(x + y) +Mc-y = ±A
MB-y + 2Mc(y + z) +MD-z = ±B
Mc-z + 2MD (z + t) =
(O
eller
MB =
q
120
A [4 [y + z) (z + t) - 4-2 B ■ y [z + t) + C ■ y ■ z
D
MC = -
q_
60
A-y
(z + t) - 2 B • (a + y) [y + z) + C • z (x + y)
D
Md =
9
120
A • y ■ z - 2 B • z (x + y) + C [4 (x + y) (y + z) - y2}
där
D
D=* (z + t) [4 (x + y)(y + z) - y2] - z2 (x + y)
(2)
Lösningsförfarande vid fyra stöd
En åskådlig bild av lösningsförfarandet och en uppfattning
om antalet erforderliga maskinräkningsoperationer,
tidsåtgång m.m., framgår av lösningen av
fyrstöds-ekvationerna.
Utseendet av momentfördelningen i en balk på fyra stöd
belastad med godtycklig trapetslast framgår av fig. 3. På
samma sätt som vid femstödsbalken fås stödmomenten:
Mb =
Mc =
2 R(y + z) -S-y
T
2S (x+ y) - R-y
där
R = x3 [15 - 8x (1 - a)] +
+ y3 [15 - (15 x + 7y)(l — a)]
S = if [15 - (15 x + 8 y) (1 - «)] +
+ z3 [15 - (15 x + 15 y + 7 z) (1 - a)]
T = 4 (x + y) (y + z) -
y-och där förhållandet
x + y + z = 1
utnyttjats.
En förutsättning för att stödmomentet MB eller Mc skall
vara dimensionerande för balken är att dess talvärde alltid
är större än fältmomenten Mx, My och Mz, fig. 3. Kontroll
av optimala balken på tre stöd visar, att fältmomenten där
alltid är mindre än stödmomentet, och det är därför na-
turligt att anta att så skall vara fallet även för balken
på fyra stöd. Detta antagande måste givetvis verifieras
sedan problemet lösts.
Antas dessutom att den optimala fyrstödsbalken har alla
stödmomenten lika stora (gäller "intuitivt" för t.ex.
tra-petsformad last men är såvitt bekant hittills ej bevisat)
gäller det alltså att med exempelvis x = konst avpassa y
och z (= 1 — x — y), så att MB = Mc och att beräkna MB
eller Mc- Upprepas förfarandet för olika värden på x skall
av de värdegrupper (x, y, z) som ger MB — Mc den väljas,
som ger minsta värdet på MB och Mc-
För oc — 1 är av symmetriskäl x — z och med de införda
antagandena kan x, y (= 1 — 2 x) och z ( = x) bestämmas
exakt. Man erhåller för beräkning av x vid MB — Mc=
Mextrem en tredjegradsekvation med endast en reell rot,
som motsvarar Mm[n.
Passningsräkningen för at ‡ 1 gick till så att för närmast
mindre värde på oc y och z varierades medan x hölls
konstant (= det värde som vid föregående a-värde gav Mmin)
till dess villkoret MB—MC var uppfyllt med tillräcklig
noggrannhet.
Med något minskat värde på x upprepades detta
förfarande varvid M till en början minskade.
När M efter upprepade minskningar av x slutligen blev
större än vid föregående räkning hade x inneslutits mellan
två gränser och slutgiltiga värden på x, y, z och M kunde
erhållas med interpolering och kontrollräkning.
Härvid åtgick följande antal maskinräkningsoperationer:
För att beräkna K • MB och K • Mc (K = en konstant) 38
För att slutgiltigt beräkna M = (1/2 MB + 1/2 Mc) 45.
Vid lösningen krävdes för varje a-värde i medeltal, att
fyra x-värden prövades och vid varje x-värde måste tre
omräkningar göras, innan M kunde beräknas. Detta gör
totalt ca 650 operationer per a-värde, vilket för en
tämligen van maskinräknare med nedskrivningar tog
unge-för 3 h.
Lösning vid fem stöd
Med samma antaganden vid femstöds- som vid
fyrstödsbalken skulle ett i princip likadant lösningsförfarande
kunna användas. Då emellertid variablerna här är fyra skulle
passningsarbetet kräva en mycket lång tid. Enbart en
kontroll av erhållna värden på x, y, z och t kräver 13
beräkningar av M och antas att varje beräkning fordrar
trefaldiga antalet operationer gör detta ca 2 000 operationer
eller en tid av ca 9 h. Själva passningsarbetet skulle kräva
den mångdubbla tiden. Hela tidsåtgången per a-värde
uppskattar vi vara av storleksordningen 50 h.
Lösningen av ekvationssystemet (2) överläts därför till
Matematikmaskinnämnden. Nu infördes antagandet
Mb = Mc = MD = M
redan i ekvationssystemet (1), vilket leder till
problemställningen:
x + y + z + t = 1
q-A
M =
M =
M =
där
60 (2 x + 3 y)
q B
180 (y + z)
q-c_
60 (3 z + 2 t)
(3)
A = x3 [15 - 8x (1 - a)] + y3 [15 x + 7y (1 - a)]
B = y3 [15 - (15 x + 8 y) (1 - a)] +
+ z3 [15 - (15 x + 15 y + 7 z) (1 - a)]
C = z3 [15 - (15 x + 15 y + 8 z) (1 - a)] +
+ t3 [15 - (15 x + 15 y + 15 z + 7 t) (1 - a)]
Uppgiften formulerades så att x, y, z, t och M skulle
beräknas för M = Mmin och detta skulle göras för oc = 0,00,
0,05, 0,10... 0,95, 1,00.
x, y, z och t skulle anges med ett fel mindre än 1 %.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}