
Full resolution (JPEG) - On this page / på denna sida - Sidor ...
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Maskinsvängningar
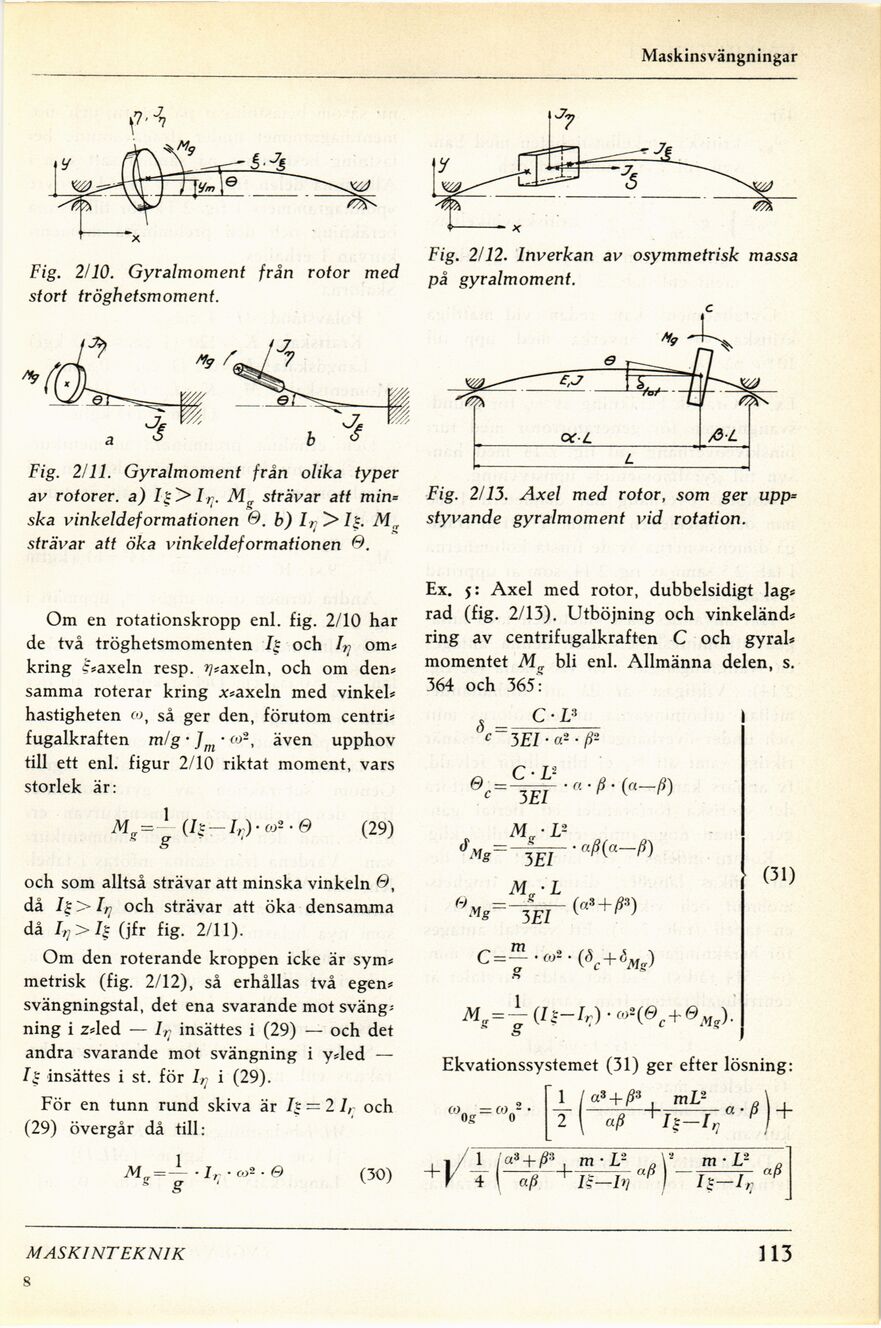
Fig. 2/10. Gyralmoment från rotor med
stort tröghetsmoment.
Fig. 2/12. Inverkan av osymmetrisk massa
på gyralmoment.
Fig. 2/11. Gyralmoment från olika typer
av rotorer, a) Mg strävar att min=
ska vinkeldeformationen O. b) Irj > 1$. M„
strävar att öka vinkeldeformationen O.
Om en rotationskropp enl. fig. 2/10 har
de två tröghetsmomenten I£ och om*
kring Växeln resp. växeln, och om den*
samma roterar kring x*axeln med vinkel*
hastigheten cot så ger den, förutom centri*
fugalkraften m/g • J • <o2, även upphov
till ett enl. figur 2/10 riktat moment, vars
storlek är:
Ir)-oß-G
(29)
och som alltså strävar att minska vinkeln
då /| > Irj och strävar att öka densamma
då /,;>/| (jfr fig. 2/11).
Om den roterande kroppen icke är sym*
metrisk (fig. 2/12), så erhållas två egen*
svängningstal, det ena svarande mot sväng*
ning i z*led — hj insättes i (29) — och det
andra svarande mot svängning i y*led —
1$ insättes i st. för lv i (29).
För en tunn rund skiva är /« = 2 /, och
(29) övergår då till:
M =— ■ Ir - - 6»
Fig. 2/13. Axel med rotor, som ger upp=
styvande gyralmoment vid rotation.
Ex. j: Axel med rotor, dubbelsidigt lag
rad (fig. 2/13). Utböjning och vinkeländ
ring av centrifugalkraften C och gyral
momentet M, bli enl. Allmänna delen, s
364 och 365:
8 =
CL3
c 3EI • a2 • ß2
C-D
6c= 3EI
ß-(a-ß)
M„ ■ I2
cF„ =—i–-aß(a-ß)
Mg 5E1 ^ I >
M ’ L
(-) =_J?_
Mg wi
(«3 + ^>)
C =
m
>M<U<W
(31)
Ekvationssystemet (31) ger efter lösning:
1 la3 + ß3 , mU
aß 1 J|—Ir
a-ß\ +
,1/1 ia3-\-ß3 m-L2 o\! m-L2 ß
<*» +V T nß) aß
MASKINTEKNIK
8
113
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}