
Full resolution (JPEG) - On this page / på denna sida - Häfte 6. 9 febr. 1935 - Maskinell lösning av differentialekvationer, av Enar Eskilsson
<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has been proofread at least once.
(diff)
(history)
Denna sida har korrekturlästs minst en gång.
(skillnad)
(historik)
Teknisk Tidskrift
HÄFT. 6 UTGIVEN AV SVENSKA TEKNOLOGFÖRENINGEN 9 FEBR.
ÅRG. 65 HUVUDREDAKTÖR: CARL KLEMAN 1935
INNEHÅLL: Maskinell lösning av differentialekvationer. — Ekonomisk översikt. — Notiser. — Insänt.
— Sammanträden.
MASKINELL LÖSNING AV DIFFERENTIALEKVATIONER.
Redan år 1876 föreslog sir William Thomson att
man skulle sammankoppla integreringsapparater
av det slag, som uppfunnits av hans broder till en
maskin, som kunde lösa differentialekvationer. Den
fundamentala principen för en sådan maskin är
sålunda gammal, men den mekaniska utformningen har
tagit lång tid.
Ett av de problem som förelegat har varit att bygga
en integreringsapparat med det registrerande
organet i stånd att tåla det belastningsmoment, som
erfordras för att röra mekaniska delar. Man kunde
visserligen tänka sig integreringen utförd på elektrisk
väg med hjälp av en energimätare. Med elektrisk
ström är det ju lätt att med olika kretsar av
kapaciteter och induktanser få till stånd såväl integrering
som derivering. Det erbjuder även andra
fördelar. Men önskar man stor noggrannhet, visar det
sig, att man kommer längst med enbart
mekaniskt förfarande.
I Förenta staterna har vid
Massachusetts Institute of Technology i
Cambridge konstruerats en sådan maskin,
en "differential analyzer", som ger
mycket noggranna lösningar och har
befunnits vara av utomordentligt stor
användning. Vid en tidigare utförd
liknande maskin[1]
använde man sig av
elektrisk integrering, men på den nya
har man mekaniska apparater härför
och använder elektricitet endast för
driften.
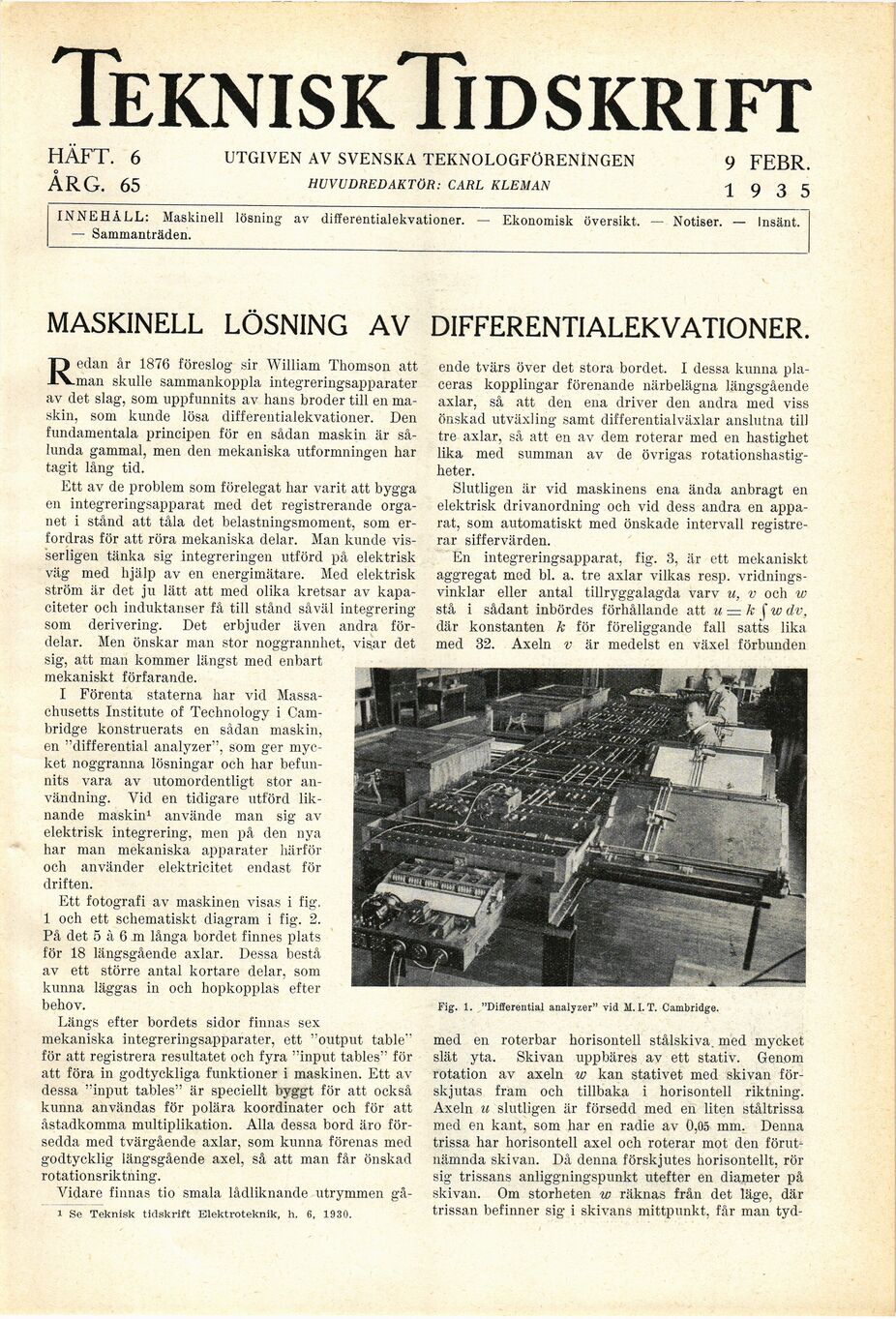
Ett fotografi av maskinen visas i fig.
1 och ett schematiskt diagram i fig. 2.
På det 5 à 6 m långa bordet finnes plats
för 18 längsgående axlar. Dessa bestå
av ett större antal kortare delar, som
kunna läggas in och hopkopplas efter
behov.
Längs efter bordets sidor finnas sex
mekaniska integreringsapparater, ett "output table"
för att registrera resultatet och fyra "input tables" för
att föra in godtyckliga funktioner i maskinen. Ett av
dessa "input tables" är speciellt byggt för att också
kunna användas för polära koordinater och för att
åstadkomma multiplikation. Alla dessa bord äro
försedda med tvärgående axlar, som kunna förenas med
godtycklig längsgående axel, så att man får önskad
rotationsriktning.
Vidare finnas tio smala lådliknande utrymmen
gående tvärs över det stora bordet. I dessa kunna
placeras kopplingar förenande närbelägna längsgående
axlar, så att den ena driver den andra med viss
önskad utväxling samt differentialväxlar anslutna till
tre axlar, så att en av dem roterar med en hastighet
lika med summan av de övrigas
rotationshastigheter.
Slutligen är vid maskinens ena ända anbragt en
elektrisk drivanordning och vid dess andra en
apparat, som automatiskt med önskade intervall
registrerar siffervärden.
 |
| Fig. 1. "Differential analyzer" vid M. I. T. Cambridge. |
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}