
Full resolution (JPEG) - On this page / på denna sida - Sidor ...

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
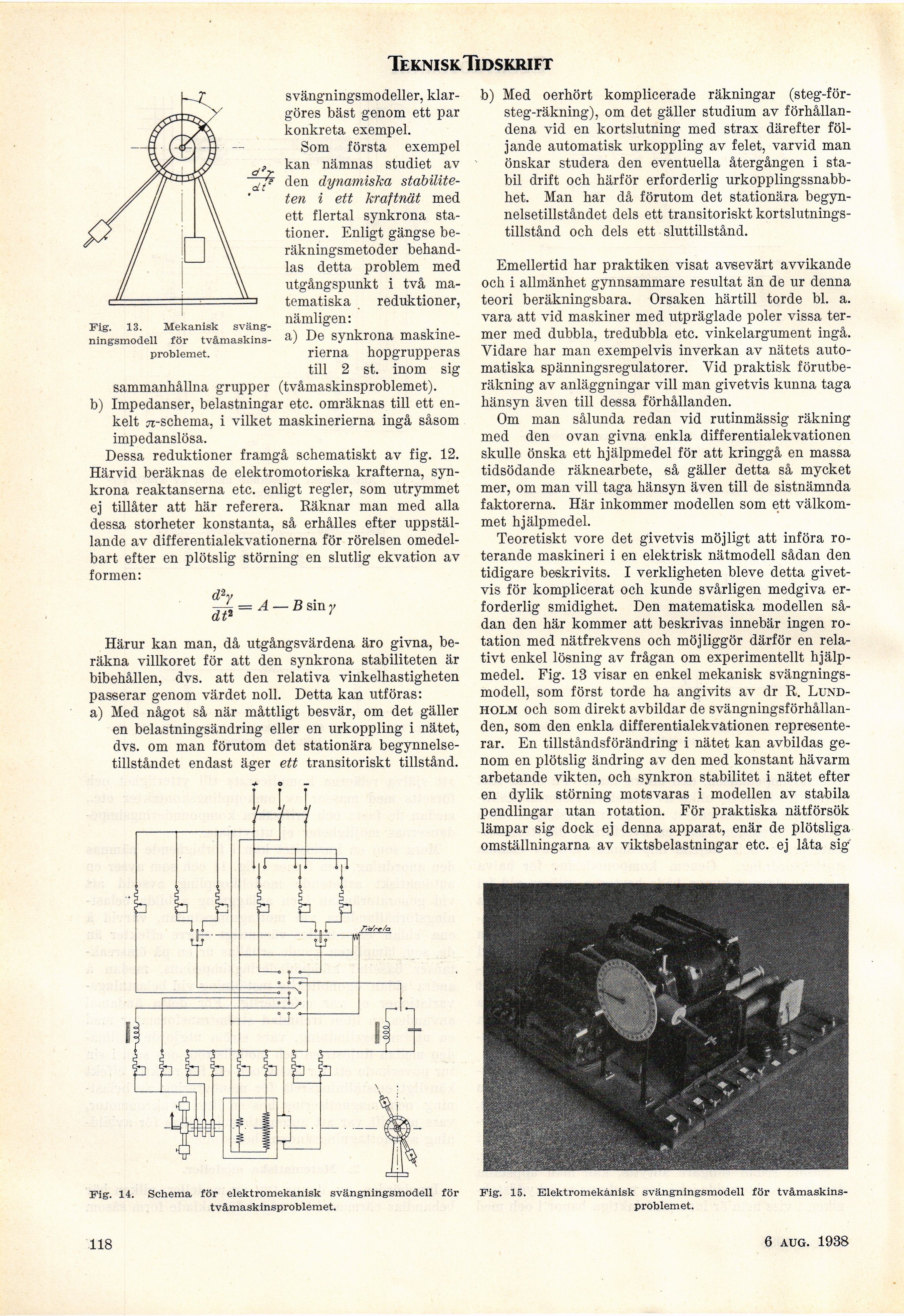
Fig. 14. Schema för elektromekanisk svängningsmodell för
tvåmaskinsproblemet.
TekniskTidskrift
b) Med oerhört komplicerade räkningar
(steg-försteg-räkning), om det gäller studium av
förhållandena vid en kortslutning med strax därefter
följande automatisk urkoppling av felet, varvid man
önskar studera den eventuella återgången i
stabil drift och härför erforderlig
urkopplingssnabb-het. Man har då förutom det stationära
begynnelsetillståndet dels ett transitoriskt
kortslutningstillstånd och dels ett sluttillstånd.
Emellertid har praktiken visat avsevärt avvikande
och i allmänhet gynnsammare resultat än de ur denna
teori beräkningsbara. Orsaken härtill torde bl. a.
vara att vid maskiner med utpräglade poler vissa
termer med dubbla, tredubbla etc. vinkelargument ingå.
Vidare har man exempelvis inverkan av nätets
automatiska spänningsregulatorer. Vid praktisk
förutberäkning av anläggningar vill man givetvis kunna taga
hänsyn även till dessa förhållanden.
Om man sålunda redan vid rutinmässig räkning
med den ovan givna enkla differentialekvationen
skulle önska ett hjälpmedel för att kringgå en massa
tidsödande räknearbete, så gäller detta så mycket
mer, om man vill taga hänsyn även till de sistnämnda
faktorerna. Här inkommer modellen som ett
välkommet hjälpmedel.
Teoretiskt vore det givetvis möjligt att införa
roterande maskineri i en elektrisk nätmodell sådan den
tidigare beskrivits. I verkligheten bleve detta
givetvis för komplicerat och kunde svårligen medgiva
erforderlig smidighet. Den matematiska modellen
sådan den här kommer att beskrivas innebär ingen
rotation med nätfrekvens och möjliggör därför en
relativt enkel lösning av frågan om experimentellt
hjälpmedel. Fig. 13 visar en enkel mekanisk
svängningsmodell, som först torde ha angivits av dr R.
Lundholm och som direkt avbildar de
svängningsförhållanden, som den enkla differentialekvationen
representerar. En tillståndsförändring i nätet kan avbildas
genom en plötslig ändring av den med konstant hävarm
arbetande vikten, och synkron stabilitet i nätet efter
en dylik störning motsvaras i modellen av stabila
pendlingar utan rotation. För praktiska nätförsök
lämpar sig dock ej denna apparat, enär de plötsliga
omställningarna av viktsbelastningar etc. ej låta sig
Härur kan man, då utgångsvärdena äro givna,
beräkna villkoret för att den synkrona stabiliteten är
bibehållen, dvs. att den relativa vinkelhastigheten
passerar genom värdet noll. Detta kan utföras:
a) Med något så när måttligt besvär, om det gäller
en belastningsändring eller en urkoppling i nätet,
dvs. om man förutom det stationära
begynnelsetillståndet endast äger ett transitoriskt tillstånd.
svängningsmodeller,
klargöres bäst genom ett par
konkreta exempel.
Som första exempel
kan nämnas studiet av
den dynamiska
stabiliteten i ett kraftnät med
ett flertal synkrona
stationer. Enligt gängse
beräkningsmetoder behandlas detta problem med
utgångspunkt i två
matematiska reduktioner,
nämligen:
a) De synkrona
maskinerierna hopgrupperas
till 2 st. inom sig
sammanhållna grupper (tvåmaskinsproblemet).
b) Impedanser, belastningar etc. omräknas till ett
enkelt ^-schema, i vilket maskinerierna ingå såsom
impedanslösa.
Dessa reduktioner framgå schematiskt av fig. 12.
Härvid beräknas de elektromotoriska krafterna,
synkrona reaktanserna etc. enligt regler, som utrymmet
ej tillåter att här referera. Räknar man med alla
dessa, storheter konstanta, så erhålles efter
uppställande av differentialekvationerna för rörelsen
omedelbart efter en plötslig störning en slutlig ekvation av
formen:
d2y , n .
ifk = B smy
Fig. 15. Elektromekanisk svängningsmodell för
tvåmaskinsproblemet.
6 aug. 1938
Fig. 13. Mekanisk
svängningsmodell för
tvåmaskinsproblemet.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}