
Full resolution (JPEG) - On this page / på denna sida - Häfte 11 ½. 23 mars 1939 - Matematiska maskiner i U. S. A., av Stig Ekelöf

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
Matematiska maskiner i U. S. A.
Av docent STIG EKELÖF.1
Inledning.
I Förenta staterna råder f. n. ett mycket starkt
intresse för maskiner, som på mekanisk och elektrisk
väg utföra komplicerade matematiska operationer,
såsom lösandet av algebraiska ekvationer och
differentialekvationer, beräkning av integraler m. m. Som
bevis på detta intresse kan nämnas den konferens om
"mathematical machines", som ägde rum vid
American Institute of Electrical Engineers’ sommarmöte i
Washington 1938. Den samlade en talrik skara
deltagare från industrien, från universitet och högskolor
och från olika allmänna institutioner.
Ett centrum för arbetet i U. S. A. på dessa maskiner
utgör Massachusetts Institute of Technology (M. 1.11.),
närmare bestämt dess elektrotekniska fackavdelning.
Förf. hade tillfälle att under en stor del av
föregående år vistas vid denna Staternas väl främsta
tekniska högskola. Den drivande kraften bakom det
nämnda arbetet vid M. I. T. har varit och är alltjämt
Dr. V. Bush.
1 den följande redogörelsen för de olika maskiner
förf. stiftat bekantskap med vid M. I. T. ocli
annorstädes, skola vi börja med de enklaste matematiska
operationerna och därmed i stort sett de enklaste
maskinerna samt fortskrida mot de mera
komplicerade.
Maskin för lösande av lineära ekvationssystem [20]."
Denna maskin, som konstruerats vid M. I. T:s
Department of Civil Engineering, är främst avsedd för
problem rörande fackverkskonstruktioner. Den löser
på mekanisk väg lineära ekvationssystem med reella
koefficienter och upp till nio obekanta.
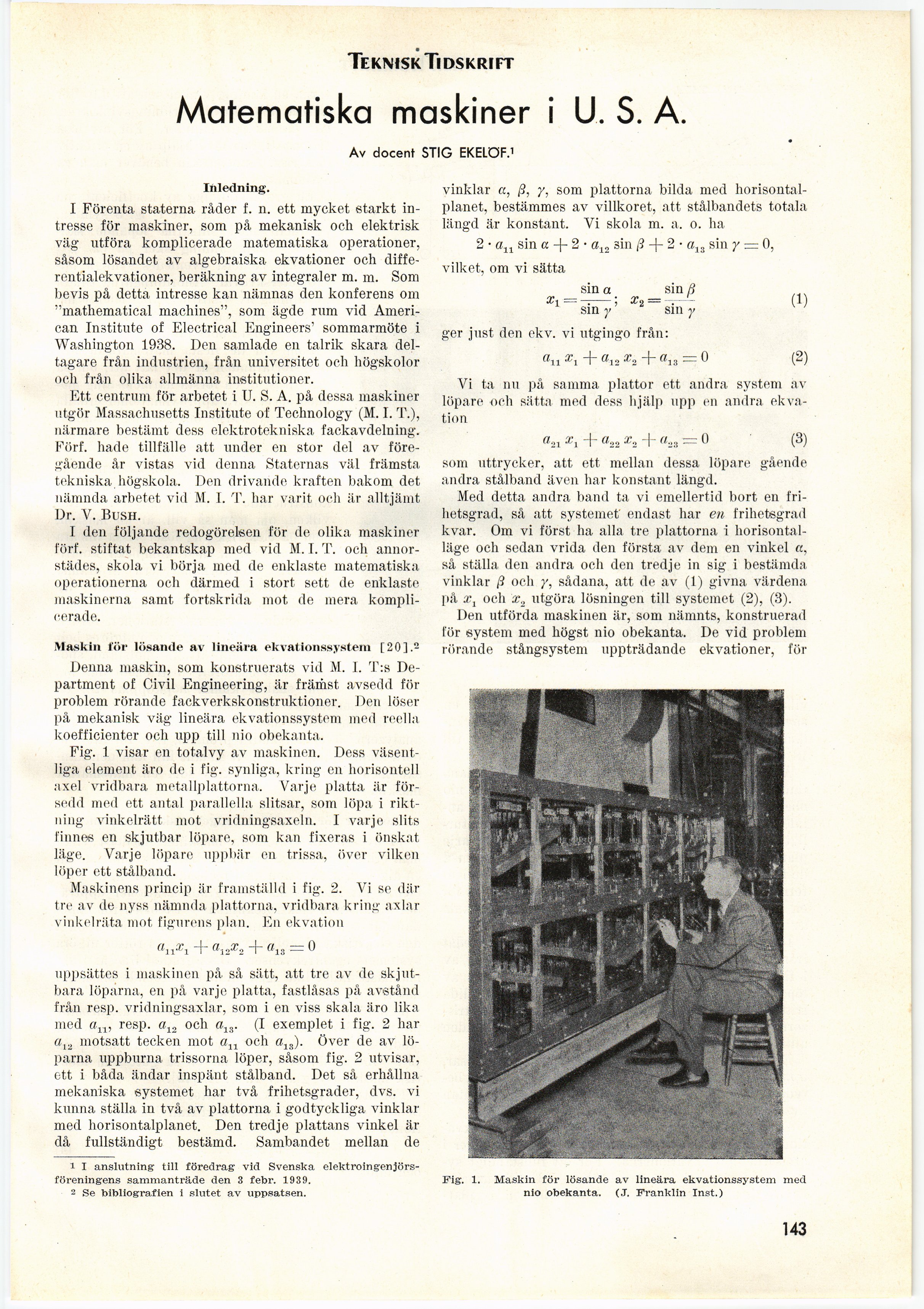
Fig. 1 visar en totalvy av maskinen. Dess
väsentliga element äro de i fig. synliga, kring en horisontell
axel vridbara metallplattorna. Varje platta är
försedd med ett antal parallella slitsar, som löpa i
riktning vinkelrätt mot vridningsaxeln. I varje slits
finnes en skjutbar löpare, som kan fixeras i önskat
läge. Varje löpare uppbär en trissa, över vilken
löper ett stålband.
Maskinens princip är framställd i fig. 2. Vi se där
tre av de nyss nämnda plattorna, vridbara kring axlar
vinkelräta mot figurens plan. En ekvation
alxxt + a12x2 -|- als — 0
uppsattes i maskinen på så sätt, att tre av de
skjutbara löparna, en på varje platta, fastlåsas på avstånd
från resp. vridningsaxlar, som i en viss skala äro lika
med aa, resp. a12 och a13. (I exemplet i fig. 2 har
al2 motsatt tecken mot alt och als). Över de av
löparna uppburna trissorna löper, såsom fig. 2 utvisar,
ett i båda ändar inspänt stålband. Det så erhållna
mekaniska systemet har två frihetsgrader, dvs. vi
kunna ställa in två av plattorna i godtyckliga vinklar
med horisontalplanet. Den tredje plattans vinkel är
då fullständigt bestämd. Sambandet mellan de
1 I anslutning till föredrag vid Svenska
elektroingenjörsföreningens sammanträde den 3 febr. 1939.
2 Se bibliografien i shrtet av uppsatsen.
vinklar a, ß, y, som plattorna bilda med
horisontalplanet, bestämmes av villkoret, att stålbandets totala
längd är konstant. Vi skola m. a. o. ha
2 • sin a + 2 • a12 sin ß -f- 2 • a13 sin y — 0,
vilket, om vi sätta
ger just den ekv. vi utgingo från:
«11 + «12 X2 + «13 = 0 (2)
Vi ta nu på samma plattor ett andra system av
löpare och sätta med dess hjälp upp en andra
ekvation
fl21 Xl + ®22 X2 + — 0 (3)
som uttrycker, att ett mellan dessa löpare gående
andra stålband även har konstant längd.
Med detta andra band ta vi emellertid bort en
frihetsgrad, så att systemet’ endast har en frihetsgrad
kvar. Om vi först ha alla tre plattorna i
horisontalläge och sedan vrida den första av dem en vinkel a,
så ställa den andra och den tredje in sig i bestämda
vinklar ß och y, sådana, att de av (1) givna värdena
på x1 och x2 utgöra lösningen till systemet (2), (3).
Den utförda maskinen är, som nämnts, konstruerad
för system med högst nio obekanta. De vid problem
rörande stångsystem uppträdande ekvationer, för
Fig. 1. Maskin för lösande av lineära ekvationssystem med
nio obekanta. (J. Franklin Inst.)
143
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}