
Full resolution (JPEG) - On this page / på denna sida - Sidor ...

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
Teknisk Tidskrift
Ovanstående visar, huru det rent mekaniska
uträknandet av vektorer, dyadiker osv. utföres.
Givetvis förekomma många andra möjliga matematiska
begrepp såsom t. e. differentiering, men i stället för’
att ägna allt för mycket utrymme åt dessa detaljer
skall jag nu söka klargöra vad den egentliga
avsikten med skrivsättet är.
Tidsvinst, överskådlighet och generalitet.
Som det torde ha framgått av ovanstående
inledning, möjliggör tensoranalys en viss generell
problemlösning. Genom att använda ett "stenografiskt"
beteckningssätt är det sålunda möjligt att bespara en
hel del skrivande.
Tag som ett exempel ekvationen
e = Z • i (11)
som givetvis kan beteckna många olika
"komponenter" av spänningen e, strömmen i och impedansen Z.
Det är tydligt att likheten (11) representerar vilken
som helst "generell maskin", som består av en
kombination av stationära ledare. Som exempel må
anföras transformatorer och kraftledningar.
Om man önskar lösa ekvation (11) med avseende
på strömmen i, kan man givetvis göra detta genom att
gå tillbaka till det ursprungliga ekvationssystemet
(2), men man kan också göra det symboliskt med att
skriva
i = Z’1 • e, (12)
som uttrycker i som produkten av den inverterade
impedansen Z_1 och spänningen e. Om den
ursprungliga avsikten med det hela endast var att
finna i, har givetvis härmed ingenting vunnits, ty
ekvation (12) måste "uträknas", dvs. Z_1 måste
bestämmas, och arbetet därmed är detsamma som att lösa
ekvationssystemet (2) med avseende på i. Skulle
däremot (12) endast vara ett led i en massa
räkningar, är det fördelaktigt att icke uträkna Z"1,
eftersom man då blott förlorar i överskådlighet och det
dessutom är möjligt, att under utvecklingens gång
Z"1 försvinner, t. e. efter en multiplicering med Z,
eftersom
Z • z-1 = /
där / betecknar en s. k. "enhetsmatris", i vilken varje
term är noll utom de tre diagonaltermerna aaa, abh och
acc som äro lika med ett.
Den tidsvinst och överskådlighet, som tensoranalys
möjliggör, representerar endast en bråkdel av dess
verkliga värde. Den största fördelen ligger i att det
är möjligt att skriva en ekvation, som representerar
en "generell maskin", dvs. varje maskin tillhörande
en viss "grupp" med liknande egenskaper. De olika
elementen av en sådan maskin uttryckas i
matrisform och "sammankopplas" sedan medelst s. k.
"trans-formationsmatriser". Genom att multiplicera ett
element med en transformationsmatris erhålles ett
"tvunget" system. Härigenom har åtminstone en
del av generaliteten förlorats, men i stället har en
ekvation erhållits, som representerar ett visst
kopplingsdiagram. För att erhålla andra diagram fordras
andra transformationsmatriser. Dessa bestå alla av
"tabeller", vilka t. e. ånge, huru strömmarna i det
generella fallet skola ersättas med strömmarna i det
speciella fallet.
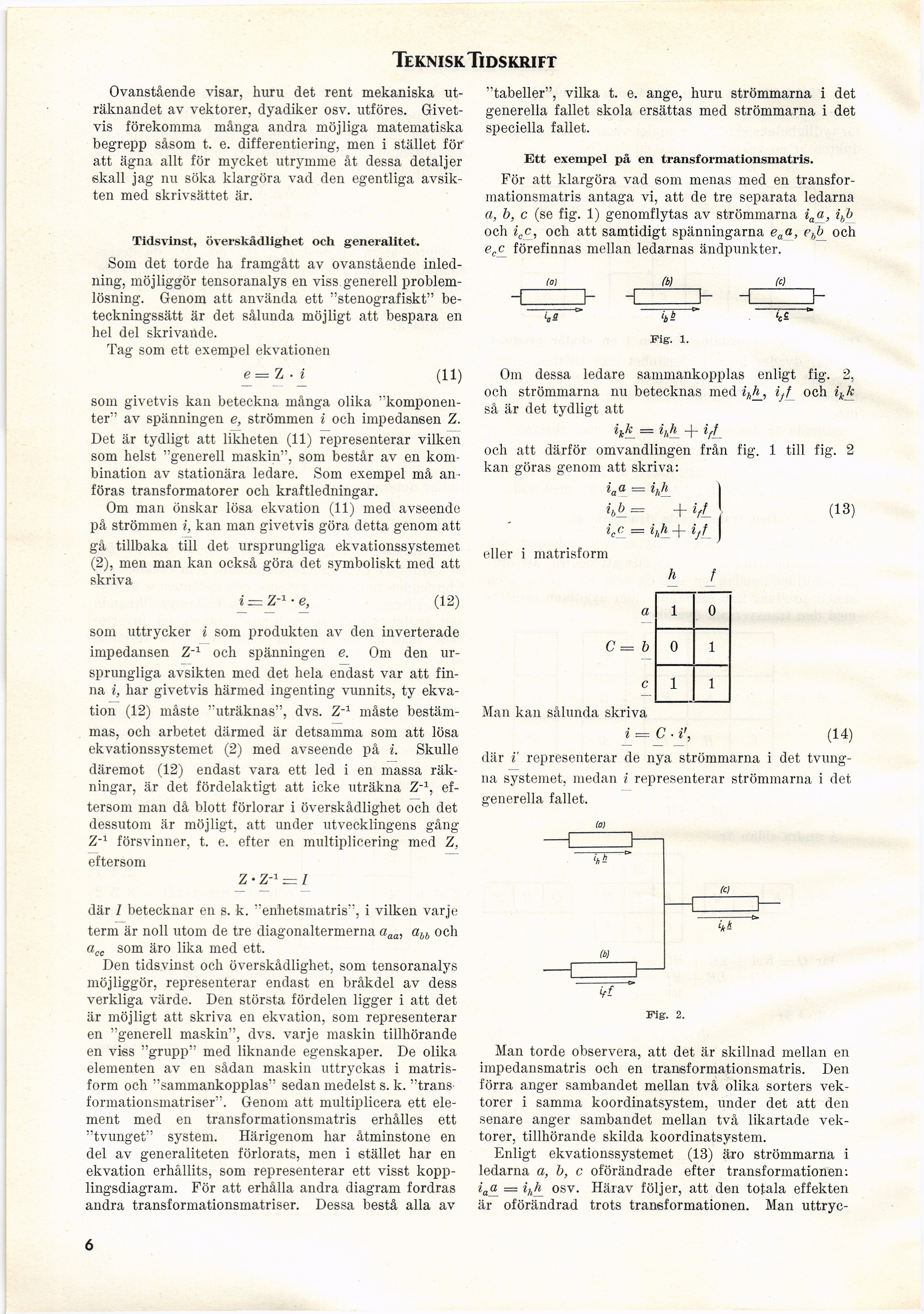
Ett exempel på en transformationsmatris.
För att klargöra vad som menas med en
transformationsmatris antaga vi, att de tre separata ledarna
a, b, c (se fig. 1) genomflytas av strömmarna iaa, ihb
och icc, och att samtidigt spänningarna eaa, och
ecc_ förefinnas mellan ledarnas ändpunkter.
(at _(b)__fe)
H h H h H h
-;-O- -^-T-1» -J—-1»
<é* <c£
Fig’. 1.
Om dessa ledare sammankopplas enligt fig. 2,
och strömmarna nu betecknas med ihh_, och ikk
så är det tydligt att
ihk = ihh -j- iff
och att därför omvandlingen från fig. 1 till fig. 2
kan göras genom att skriva:
ibb = +iff I (13)
= hh + «// |
eller i matrisform
h f
a
C — b
c
Man kan sålunda skriva
i = C • i’, (14)
där i’ representerar de nya strömmarna i det
tvungna systemet, medan i representerar strömmarna i det
generella fallet.
la)
(b)
-^
iff
Fig-, 2.
Man torde observera, att det är skillnad mellan en
impedansmatris och en transformationsmatris. Den
förra anger sambandet mellan två olika sorters
vektorer i samma koordinatsystem, under det att den
senare anger sambandet mellan två likartade
vektorer, tillhörande skilda koordinatsystem.
Enligt ekvationssystemet (13) äro strömmarna i
ledarna a, b, c oförändrade efter transformationen:
iaa = osv. Härav följer, att den totala effekten
är oförändrad trots transformationen. Man uttryc-
1 0
0 1
1 1
6
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}