
Full resolution (JPEG) - On this page / på denna sida - H. 48. 2 december 1944 - Automatisk kalkylator för regleringsändamål, av Einar Welin och Stig Djure

<< prev. page << föreg. sida << >> nästa sida >> next page >>
Below is the raw OCR text
from the above scanned image.
Do you see an error? Proofread the page now!
Här nedan syns maskintolkade texten från faksimilbilden ovan.
Ser du något fel? Korrekturläs sidan nu!
This page has never been proofread. / Denna sida har aldrig korrekturlästs.
1386
■ TEKNISK TIDSKRIFT
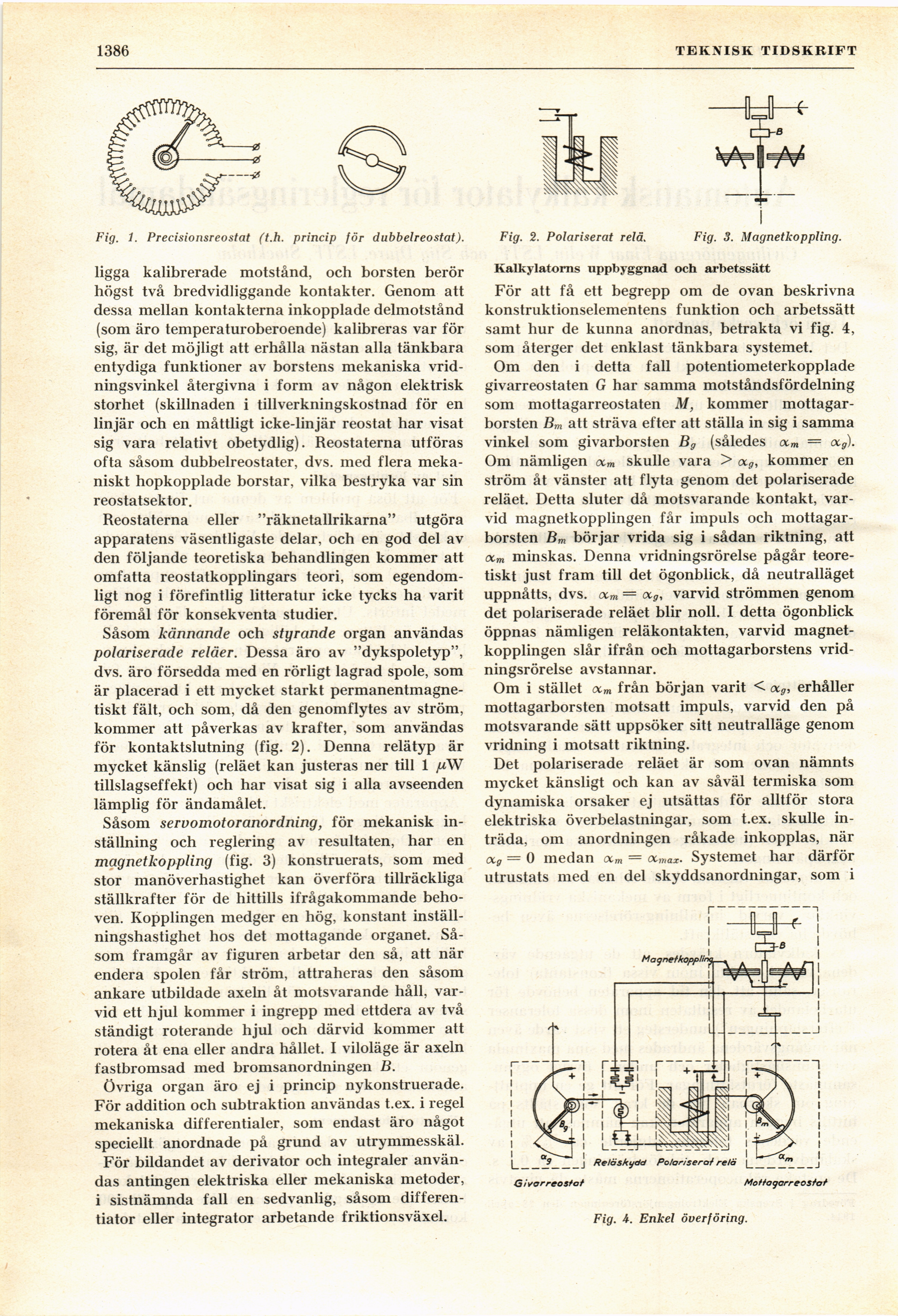
Fig. 1. Precisionsreostat (t.h. princip för dubbelreostat).
ligga kalibrerade motstånd, och borsten berör
högst två bredvidliggande kontakter. Genom att
dessa mellan kontakterna inkopplade delmotstånd
(som äro temperaturoberoende) kalibreras var för
sig, är det möjligt att erhålla nästan alla tänkbara
entydiga funktioner av borstens mekaniska
vridningsvinkel återgivna i form av någon elektrisk
storhet (skillnaden i tillverkningskostnad för en
linjär och en måttligt icke-linjär reostat har visat
sig vara relativt obetydlig). Reostaterna utföras
ofta såsom dubbelreostater, dvs. med flera
mekaniskt hopkopplade borstar, vilka bestryka var sin
reostatsektor.
Reostaterna eller "räknetallrikarna" utgöra
apparatens väsentligaste delar, och en god del av
den följande teoretiska behandlingen kommer att
omfatta reostatkopplingars teori, som
egendomligt nog i förefintlig litteratur icke tycks ha varit
föremål för konsekventa studier.
Såsom kännande och styrande organ användas
polariserade reläer. Dessa äro av "dykspoletyp",
dvs. äro försedda med en rörligt lagrad spole, som
är placerad i ett mycket starkt
permanentmagne-tiskt fält, och som, då den genomflytes av ström,
kommer att påverkas av krafter, som användas
för kontaktslutning (fig. 2). Denna relätyp är
mycket känslig (reläet kan justeras ner till 1 juW
tillslagseffekt) och har visat sig i alla avseenden
lämplig för ändamålet.
Såsom servomotoranordning, för mekanisk
inställning och reglering av resultaten, har en
magnetkoppling (fig. 3) konstruerats, som med
stor manöverhastighet kan överföra tillräckliga
ställkrafter för de hittills ifrågakommande
behoven. Kopplingen medger en hög, konstant
inställningshastighet hos det mottagande organet.
Såsom framgår av figuren arbetar den så, att när
endera spolen får ström, attraheras den såsom
ankare utbildade axeln åt motsvarande håll,
varvid ett hjul kommer i ingrepp med ettdera av två
ständigt roterande hjul och därvid kommer att
rotera åt ena eller andra hållet. I viloläge är axeln
fastbromsad med bromsanordningen B.
Övriga organ äro ej i princip nykonstruerade.
För addition och subtraktion användas t.ex. i regel
mekaniska differentialer, som endast äro något
speciellt anordnade på grund av utrymmesskäl.
För bildandet av derivator och integraler
användas antingen elektriska eller mekaniska metoder,
i sistnämnda fall en sedvanlig, såsom
differen-tiator eller integrator arbetande friktionsväxel.
Fig. 2. Polariserat relä. Fig. 3. Magnetkoppling.
Kalkylatorns nppbyggnad och arbetssätt
För att få ett begrepp om de ovan beskrivna
konstruktionselementens funktion och arbetssätt
samt hur de kunna anordnas, betrakta vi fig. 4,
som återger det enklast tänkbara systemet.
Om den i detta fall potentiometerkopplade
givarreostaten G har samma motståndsfördelning
som mottagarreostaten M, kommer
mottagar-borsten Bm att sträva efter att ställa in sig i samma
vinkel som givarborsten Bg (således OCm — OCg).
Om nämligen ocm skulle vara > ocg, kommer en
ström åt vänster att flyta genom det polariserade
reläet. Detta sluter då motsvarande kontakt,
varvid magnetkopplingen får impuls och
mottagar-borsten Bm börjar vrida sig i sådan riktning, att
ocm minskas. Denna vridningsrörelse pågår
teoretiskt just fram till det ögonblick, då neutralläget
uppnåtts, dvs. OCm — 1 varvid strömmen genom
det polariserade reläet blir noll. I detta ögonblick
öppnas nämligen reläkontakten, varvid
magnetkopplingen slår ifrån och mottagarborstens
vridningsrörelse avstannar.
Om i stället <xm från början varit < ocg, erhåller
mottagarborsten motsatt impuls, varvid den på
motsvarande sätt uppsöker sitt neutralläge genom
vridning i motsatt riktning.
Det polariserade reläet är som ovan nämnts
mycket känsligt och kan av såväl termiska som
dynamiska orsaker ej utsättas för alltför stora
elektriska överbelastningar, som t.ex. skulle
inträda, om anordningen råkade inkopplas, när
ocg = 0 medan OCm — OCmax• Systemet har därför
utrustats med en del skyddsanordningar, som i
Fig. 4. Enkel överföring.
<< prev. page << föreg. sida << >> nästa sida >> next page >>
{kind=link}